
MOTOR TRIFASICO
Los Motores Eléctricos Trifásicos son
motores
de corriente alterna.
Están diseñados para trabajar con corriente alterna (ca) trifásica, corriente utilizada en mucha aplicaciones industriales.
El motor trifásico más utilizado es el motor asíncrono trifásico de inducción que funciona gracias a los fenómenos de inducción electromagnética, que relacionan la electricidad con el magnetismos y que luego veremos.
Son los más utilizados en la industria por su sencillez, robustez y fácil mantenimiento.
Primero veamos un resumen de la corriente alterna trifásica que utilizan y del campo magnético, muy importante para entender su funcionamiento.
Pero antes de empezar, déjame recomendarte el mejor libro para aprender los automatismos eléctricos:
Libro Máquinas Eléctricas
Corriente Trifásica
A diferencia de los sistemas monofásicos de C.A., que utilizan dos conductores eléctricos (Fase y Neutro) para su distribución y consumo, los sistemas trifásicos utilizan tres o cuatro conductores.
3 Fases o 3 Fases + Neutro.
Al trabajar con 3 fases y el neutro podemos obtener 2 tensiones diferentes.
Normalmente 230V entre fase y neutro y 400V entre dos fases.
La tensión entre 2 fases es siempre la raíz de 3 veces superior a la de una fase con el neutro:
400/230 = √3
La tensión más elevada se suele utilizar en la industria y para los motores, y la más baja para uso doméstico y alumbrado.
El generador que produce la corriente trifásica se llama alternador y genera 3 fuerzas electromotrices (fem = tensiones), una en cada fase con los siguientes valores instantáneos:
e1 = Emáxima x seno wt
e2 = Emáxima x seno (wt-120º)
e3 = Emáxima x seno (wt-240º)
Siendo e la tensión instantánea, y Emáxima la máxima de la curva senoidal de la onda.
¿Qué significa esto?
Pues que los valores de las 3 tensiones (una de cada fase) están desfasadas 120º una respecto a la otra en el tiempo.
A las 3 intensidades les pasa lo mismo.
Fíjate en la gráfica como sería:

Si quieres saber más sobre la corriente alterna visita: Circuitos de Corriente Alterna.
Ventajas del Uso de Corriente Alterna Trifásica
- La primera ventaja es la posibilidad de utilizar 2 tensiones diferentes, de la que ya hablamos antes.
- Tanto los alternadores como los transformadores y motores de C.A. trifásicos poseen un mayor rendimiento y, por lo general, son mucho más sencillos y económicos que los monofásicos.
Esto se aprecia fundamentalmente en los motores trifásicos de inducción, los más utilizados en el sector industrial y los que vamos a estudiar en esta página.
Este motor posee unas características mucho mejores que el motor monofásico, como: par de arranque muchísimo más fuerte, mejor rendimiento y mejor factor de potencia.
- Los sistemas trifásicos consiguen transportar la energía eléctrica con un ahorro considerable en la sección de los conductores.
Todas estas ventajas hacen que en la actualidad toda la energía eléctrica se produzca, transporte, distribuya y consuma sea en forma de corriente alterna trifásica.
Campo Magnético
Un campo magnético es una región del espacio donde existen fuerzas magnéticas, fuerzas que atraen o repelen metales.
También se puede definir como la región del espacio donde existe magnetismo (fuerzas magnéticas).
Un imán por ejemplo tiene a su alrededor un espacio donde si colocamos una sustancia metálica, esta se verá atraída por el imán.
El campo lo podemos representar por líneas que llamaremos líneas del campo magnético.
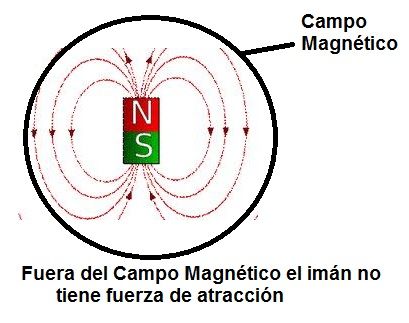
La fuerza con la que es atraída la sustancia magnética al soltarla dentro del campo magnético dependen de la fuerza que tenga el imán y de la región del campo donde la coloquemos.
No será igual la fuerza de atracción cerca del imán que en el borde del campo magnético.
Pero un campo magnético no solo lo crea un imán.
Un conductor al que le atraviesa una corriente genera alrededor de el un campo magnético, igual al de un imán.
Si el conductor lo enrollamos en forma de espira (bobina), el campo magnético será mayor, y si además estas espiras están enrolladas alrededor de un metal (electroimán) será todavía mayor el campo magnético.
Estos campos son campos magnéticos generados por medo de la electricidad.
También hay que recordar que los generadores de campos magnéticos (y el propio campo) tienen 2 polos, uno positivo y otro negativo y si juntamos dos campos magnéticos iguales (del mismo polo) los campos generan una fuerza de repulsión, pero si los polos de los campos son opuestos se genera un fuerza de atracción entre los campos.
En un conductor al que le atraviesa una corriente, los polos del campo generado dependen del sentido en el que entre y salga la corriente por el conductor.
Luego veremos más sobre esto.
Imanes con polos iguales se repelen, de polos opuestos se atraen.

Con estos conocimientos ya estamos preparados para entender el motor eléctrico trifásico.
Si quieres saber más sobre esto te recomendamos este enlace: Campo Magnético.
Funcionamiento de Un Motor Trifásico
Un motor asíncrono trifásico consta de 2 partes principales (fíjate en la imagen de más abajo):
- Parte Fija o Estator: Es la parte fija del motor.
Está constituido por una carcasa en la que está fijada una corona de chapas de acero al silicio provistas de unas ranuras.
Las espiras de los bobinados están dispuestas en dichas ranuras formando electroimanes y en tantos circuitos como fases tenga la red a la que se conectará la máquina.
En nuestro caso, los motores trifásicos, 3 bobinas y circuitos diferentes (un circuito por bobina).
Esta parte, los electroimanes que forman el estator, es la que creará el campo magnético giratorio como luego veremos, por eso también se llama Inductor, ya que inducirá una corriente en la otra parte, o lo que es lo mismo, inducirá el movimiento, como más adelante explicaremos.
- Parte Móvil o Rotor: Es la parte móvil del motor.
Esta situado en el interior del estator y consiste en un núcleo de chapas de acero al silicio apiladas que forman un cilindro, o de un bobinado eléctrico dependiendo del tipo de roto, Rotor de jaula de ardilla o Rotor bobinado.
También se llama inducido porque es donde se inducirán las tensiones, corrientes y por lo tanto el movimiento de nuestro motor.
El rotor en jaula de ardilla, el más utilizado, es un rotor con una serie de barras de aluminio o cobre (conductores) a su alrededor y unidas en cortocircuito por dos anillos en sus extremos.
El de rotor bobinado es un rotor con bobinas a su alrededor.
El campo magnético (las líneas del campo magnético) giratorio trifásico del estator cortará las varillas o chapas del rotor, en estas se induce una fuerza electromotriz (tensión) que al estar en cortocircuito se genera una corriente por ellas, corriente inducida que genera un campo que seguirá al del estator girando el rotor.
Pero....¿Por qué?
Para entenderlo tenemos que estudiar 3 descubrimientos de 3 grandes físicos.

Faraday descubrió que un conductor eléctrico moviéndose dentro de un campo magnético (imán) generaba una tensión o diferencial de potencial (d.d.p) entre sus dos extremos (igual que la pila tiene tensión entre sus dos extremos).
Como este voltaje es un voltaje inducido se le llama fuerza electromotriz (fem), en lugar de tensión.
Si unimos los extremos, por ejemplo en cortocircuito o con una bombilla, circulará una corriente por el conductor.
Mientras al mover el conductor cortemos líneas del campo magnético del imán se mantendrá en los extremos del conductor una fem si el circuito está abierto.
Si cerramos el circuito (por ejemplo conectamos una lámpara al conductor) la fem producirá una corriente por el conductor.

Esta tensión generada en la espira al ser inducida se conoce como fuerza electromotriz inducida (fem), pero simplemente es una tensión entre dos puntos.
Si cortocircuitamos las espiras, se generará por la espira una corriente inducida (corriente de cortocircuito).
Nikola Tesla descubrió que una corriente alterna trifásica genera un campo magnético giratorio al circular la corriente de cada una de las 3 fases por una bobina de un electroimán diferente (imán con bobina enrollada = electroimán).
Fíjate en la siguiente animación:

Cuando la corriente es de valor 0 no hay campo en esa fase, luego va aumentando y cada medio ciclo de la onda el campo cambia de sentido.
Vamos a ver 3 puntos muy concretos:

En el momento o punto 1, habrá 3 campos creados, dos negativos creados por L2 y L3 y uno positivo creado por L1 y que al tener la corriente el valor máximo será el campo máximo que puede crear L1.
La suma vectorial de los 3 campos nos da el vector de color negro dentro del motor.
En el punto 2 ahora será L2 la que crea el campo máximo y los otros dos serán negativos.
La suma de los 3 dan como resultado el vector en esa posición. Se puede comprobar como ha girado.
En la posición 3 el máximo campo lo crea L3 y los otros dos son negativos. El vector del campo y el campo sigue girando.
Ya tenemos nuestro campo giratorio creado por las corrientes trifásicas.
Si quieres ver otra animación aquí tienes otra muy buena: Campo Giratorio.
En nuestro motor el campo magnético generado en el estator está en movimiento y sus líneas de campo magnético cortarán las chapas metálicas (conductores) del rotor en jaula de ardilla generando entre ellas una fem, pero que al estar en cortocircuito lo que se generará será una corriente inducida que circulará por las chapas del rotor.
También sabemos que Oersted demostró que si un conductor por el que circula una corriente eléctrica se encuentra dentro de un campo magnético y sus líneas de campo cortan al conductor, el conductor se desplaza perpendicularmente al campo magnético, es decir se crea una fuerza en el conductor que hace que este se mueva.
Una corriente por conductor + campo magnético = movimiento del conductor.

Realmente la corriente que circula por el conductor lo que hace es crear a su alrededor un campo magnético, como descubrió Oersted, y al interactuar el campo del imán con el campo creado en el conductor, se produce su movimiento (sería como si fueran 2 imanes).
Recuerda dos imanen enfrentados = fuerza de atracción o repulsión.
Según el sentido de la corriente por el conductor (entre o salga) el campo creado tendrá una polaridad o la contraria, por ese motivo, los campos se atraerán o repelerán, haciendo que el conductor se mueva un sentido o en otro (depende del sentido de la corriente por el conductor).
Si el conductor en lugar de ser un único conductor fuera una espira, sobre la espira se crearían 2 fuerzas de sentido contrario (par de fuerzas), porque por un lado de la espira la corriente tiene un sentido (entra) y por el otro lado tiene sentido contrario (sale) a la del otro lado de la espira, haciendo que la espira gire.
El par de fuerzas genera un Momento o Par que produce el giro de la espira.

Ahora ya estamos preparados para explicar el funcionamiento:
¿Por qué Gira un Motor Trifásico?
En nuestro motor trifásico tenemos un estator con un campo magnético giratorio (según Tesla), que corta unos conductores o chapas del rotor por los que se genera una tensión inducida llamada fem (Faraday) y que al estar estos conductores o chapas en cortocircuito se produce por ellos la circulación de una corriente inducida y se crea a su alrededor un campo magnético.
Como por las chapas del rotor (conductores) circula una corriente, se crea en ellas campos magnéticos inducidos y estos campos crean pares de fuerza en el rotor (Oersted) que hace que ¡¡¡El Rotor se Mueva o Gire!!! (Oersted).
Ya tenemos nuestro motor trifásico funcionando.
El campo magnético creado en el rotor seguirá al del estator, pero nunca logrará alcanzarlo, ya que es ese caso las líneas del campo del estator no cortarían las chapas del rotor y no se produciría corriente inducida.
Por eso se llaman "motores asíncronos", la velocidad del rotor y la del campo del estator no están sincronizadas.
Además, se llama motor de inducción porque el estator induce una corriente en el rotor para que funcione. "Motor Asíncrono Trifásico de Inducción".
La corriente inducida por las chapas del rotor lo que realmente crean es un campo magnético a su alrededor, campo que se moverá girando para seguir al campo giratorio del estator trifásico.
Es como si tuviéramos dos imanes.

Fíjate como gira el rotor de la siguiente animación cuando alimentamos con corriente trifásica el estator.
Aunque en la animación se vea el rotor como un imán, en la realidad es un rotor de jaula de ardilla, pero que como ya vimos se crea en el un campo magnético, con lo que se convierte en un imán.

Se define el deslizamiento de un motor asíncrono como la diferencia de estas velocidades expresada en tantos por ciento:
S = [(ns - n)/ns] x 100
S = deslizamiento en tanto por ciento %.
ns = velocidad síncrona del campo magnético del estator.
n = velocidad del rotor.
Un motor asíncrono trifásico de rotor en cortocircuito posee una velocidad síncrona de 3.000 r.p.m.
¿Cuál será el deslizamiento del rotor a plena carga si se mide con un tacómetro una velocidad de 2.850 r.p.m.?
S = [3000-2850/3000] = 5%.
El estator de un motor asíncrono trifásico se construye de tal forma que se alojan tres bobinas desfasadas entre sí 120º.
Cada una de estas bobinas se conecta a cada una de las fases de un sistema trifásico, por lo que por cada una de ellas circularán las corrientes instantáneas i 1 , i2 e i3.
Cuando aumenta la carga en el rotor del motor, la velocidad del rotor decrece, con lo que aumenta el deslizamiento.
Esto provoca que el flujo del estator corte las barras de rotor a mayor velocidad, y por consiguiente se incrementa mucho la intensidad en el rotor y el "par motor" para vencer el "par resistente" de la carga.
Esto es lo que ocurre por ejemplo en el arranque de los motores, en los que podemos llegar a tener intensidades absorbidas por el motor 7 veces mayores que una vez en marcha el motor.
La velocidad del rotor no disminuye mucho cuando aumenta la carga, es decir los deslizamientos de los motores trifásicos no suelen ser muy grandes.
La velocidad síncrona del campo giratorio depende del número de polos con el que se construyan los devanados en el estator y de la frecuencia de la red a la que se conecte (En España 50Hz en América 60Hz):
ns = (60 x F) / p
ns = velocidad síncrona del campo giratorio del estator.
F = Frecuencia de la red trifásica en Hertzios (Hz).
p = Número de pares de polos del estator. El mínimo sería 1 par de polos (Norte-Sur). Más adelante veremos la diferencia entre un motor de 1 par de polos y de 2 pares de polos.
Por ejemplo, si se tiene una máquina de 1 par de polos (2 polos) trabajar a 3.000rpm a 50hz, de 2 pares de polos (4 polos) la máquina girará a 1.500 revoluciones por minuto.
Si fuera de 3 pares de polos sería de 1000rpm y si fuera de 4 pares de polos sería de 750rpm.
Los polos tienen que ver con el número de bobinas que tenemos por cada fase en el bobinado del estator. Más abajo en el bobinado de los motores lo puedes ver.
Normalmente sabiendo la velocidad del motor, que viene en la placa de características, lo que hacemos es averiguar el número de polos del motor.
La potencia absorbida (o nominal) de un motor, la que viene en la placa de características, es:
Pabs = √3 x Vn x In x cose fi
Pero esta potencia no se transmite por completo en el eje del motor porque los motores tienen pérdidas. Las perdidas principales son:
- Pérdidas en el Cobre, debidas a la resistencia de los bobinados.
- Pérdidas en el hierro, debidas a la histéresis y a las corrientes parásitas o de Foucault.
- Pérdidas mecánicas, debidas a los elementos giratorios por rozamientos.

El rendimiento (η) de un motor es:
η = (Pútil / Pabsorbida) x 100; en tanto por ciento.
La potencia útil`, si ponemos el rendimiento en número, no en porcentaje (por ejemplo rendimiento de 0,87, en lugar del 87%) será:
Pu = η x Pabsorbida = η x √3 x Vn x In x cose fi;
Recuerda 1CV = 736 vatios (w), en muchos problemas viene la potencia expresada en caballos de vapor.
Arranque, Aceleración y Carga del Motor Trifásico
Cuando el motor pasa de funcionar en vacío a arrastrar una carga mecánica, el rotor tiende a frenarse por el par resistente que produce la carga contrario al giro del rotor.
Esto hace que el movimiento relativo del campo magnético giratorio respecto al rotor aumente, lo que produce un aumento de la f.e.m. y de la corriente inducida en los conductores o chapas del rotor.
Dado que el par de fuerzas que se desarrolla en el rotor o par motor depende de esta corriente, se produce un aumento de dicho par que tiende a equilibrar el par resistente con el par motor hasta alcanzar el punto de equilibrio que sería el Par Nominal Mn.
De aquí se entiende que según aumenta la carga en el motor, también aumente el deslizamiento y el par motor.
La característica del motor nos indica la relación entre el par del motor y su velocidad.
El par que desarrolla un motor de inducción esta íntimamente relacionado con la velocidad del rotor.
Dado que su relación matemática resulta un poco complicada, por lo general, esta relación se expresa gráficamente mediante una curva característica de par-velocidad.
La curva del motor par-velocidad nos determina su funcionamiento.
Par Resistente = Par de la Carga del Motor, por ejemplo un eje al que se le ha acoplado un montacargas.

Al principio el par resistente es menor que el motor, en caso contrario el motor no podría arrancar.
La curva del Par resistente debe ser siempre menor que la del motor, en caso contrario el motor no podría girar
Como el par motor es mayor que el resistente el motor se acelera, aumentando el Resistente y el Motor haciendo la curva de la gráfica.
En el momento en el que las 2 curvas se juntan se igualen los pares y ahí es donde se quedará funcionando el motor, el Par Nominal.
Si te fijas en la velocidad (n) es un poco menor que la de sincronismo, ya que si alcanzara esta velocidad como sabes dejaría de funcionar.
Funcionamiento Nominal= funcionamiento del motor en condiciones normales de operación para el que fue diseñado, es decir donde trabaja normalmente.
El par nominal, la intensidad nominal, la velocidad nominal, etc. serán valores en ese punto.
Los motores en el arranque tienen condiciones de arranque diferentes hasta que se estabiliza y funciona en su estado normal, o nominal.
El par nominal, nos da la potencia nominal y la intensidad nominal o viceversa.
Par nominal = Mn = Pu / w; potencia útil partido por la velocidad angular en radianes/segundo;
w = (2π/60) x Velocidad Nominal en rpm (n)
Mn = (Pu x 60) / (2π x n) = Newton x metros
En la curva mostrada como ejemplo se puede observar que en el momento del arranque del motor (n = 0rpm) se obtiene un par de arranque 1,5 veces mayor que su par nominal (Mn).
Si hacemos que este motor arrastre una carga que origine un par resistente Mi, el motor adaptará su velocidad hasta conseguir desarrollar un par motor Mn que consiga arrastrar la carga mecánica.
Esto se consigue a la velocidad "n" nominal.
En el caso de que aplicásemos un par resistente mayor, la velocidad disminuiría hasta que se alcanzara el equilibrio entre el par motor y el par resistente.
En el caso de que el par resistente fuese mayor que el par máximo que puede desarrollar el motor (en nuestro ejemplo: Mmáx = 2,5Mn) el motor se pararía.
Ejercicio: Un motor asíncrono trifásico posee las siguientes características: potencia eléctrica absorbida de la red 8 kW; 400 V; 50 Hz; cos de fi 0,85; rendimiento del 93%; pares de polos del devanado estatórico 2; deslizamiento a plena carga del 4%.
Calcular el par de rotación del rotor.
¿Cuál sería el par de arranque y el par máximo de este motor si su característica mecánica es la que se muestra en la figura siguiente?

La mayoría de las características de los motores eléctricos se suele expresar en la propia placa de características del motor, tal como tensiones, potencia, frecuencia, velocidad, nivel de protección, clase de aislamiento, factor de potencia, tipo de servicio, etc.

La Intensidad Nominal del Motor se puede obtener de la potencia nominal o absorbida (son la misma):
Pn = √3 x η x Vn x In x x cos fi; donde η es el rendimiento del motor a plena carga.
Ejercicio: Se desea conectar a una red trifásica de 400V un motor trifásico de inducción de 230/400V, 50Hz y 22Kw de potencia nominal, rendimiento a plena carga del 91,7% (0,917), factor de potencia 0,88 y 2.945rpm de velocidad nominal.
¿Qué intensidad absorberá de la linea?
solución : 39,35A
Si queremos obtener otros datos, como el comportamiento en servicio a diferentes regímenes de carga, tendremos que recurrir a las características que se facilitan en las informaciones técnicas que proporcionan los propios fabricantes de los motores.
En la Tabla 20.1 se muestran, a modo de ejemplo, las características técnicas de una gama de motores asíncronos trifásicos comerciales con rotor en cortocircuito de un par de polos y 50 Hz.
Debajo tenemos una comprobación para ver si los datos de intensidad son correctos.


Si te fijas en el arranque la intensidad es muy alta, puede llegar a 7 u 8 veces la nominal.
Según se va acelerando baja el valor de la intensidad absorbida por el motor, hasta llegar a la nominal.
Conexiones de los Bobinados del Estator en un Motor Trifásico
El devanado o bobinado trifásico del estator de un motor asíncrono son las bobinas donde se conectará cada fase.
Las bobinas están distribuidas en 3 fases y se distribuyen en las ranuras del interior de la circunferencia del estator.
Cada una de las 3 bobinas del estátor tienen dos mitades colocadas en posiciones diagonalmente opuestas respecto al estator.
Cada mitad creará un polo del campo magnético (norte y sur).
Las bobinas están desfasadas 120º entre si. El sentido de arrollamiento de las bobinas es tal que, cuando la corriente pasa a través de ellas, se induce un campo magnético a través del rotor.
En este caso cada bobina tiene 2 polos, con lo que el motor será bipolar.

Todas las bobinas que se conectan a la misma fase están unidas en serie formando una única bobina o bobinado, con un principio y un final.
Como tenemos 3 fases, tenemos 3 principios y 3 finales, en total 6 extremos, terminales o bornes para conectar. Incluso si las bobinas de una misma fase estuvieran conectadas en paralelo (algunas veces puede ser así) también tendríamos 3 principios y 3 finales.
Fíjate en la siguiente imagen.
Tienes un bobinado de un motor de 2 pares de polos y después conexiones de las bobinas en estrella y en triángulo.

Los terminales también se suelen llamar U1-V1-W1 los principios de los bobinados y U2-V2-W2 los finales.
Si te intersa la conexión de los bornes en la caja de bornes de otro tipo de motores, como el dahlander, el de rotor bobinado, el de 9 o 12 bornes, visita la web: Conexión Bornes Motores.
Bobinado de los Motores Trifásicos: No vamos a explicar demasiado sobre este tema ya que es una aspecto constructivo y poco nos interesa.
Simplemente te dejamos un esquema de como sería el bobinado de un estator de 36 en cada ranura iría una bobina y las bobinas irían unidas según el esquema.
El número de polos resultante sería de 2 pares de polos o 4 polos en total.


Como puedes observar tenemos 2 formas diferentes de conectar los extremos de las bobinas del estator llamadas Conexión Estrella y Conexión Triángulo.
Pero...¿Cual es la diferencia eléctrica entre una y otra?
Recuerda: Tensión de fase: es la tensión entre una fase y el neutro. Tensión de línea: es la tensión que existe entre dos fases. La VL = √3 x Vf. Si la de fase es 230, la de línea es de 400V.
Al conectar las bobinas del motor en triángulo, las bobinas quedan alimentadas a la misma tensión que la red de alimentación. Si es una alimentación trifásica de 400V (Vlinea), las bobinas del motor quedan sometidas a esa misma tensión 400V.
Al conectar las mismas bobinas en estrella, al tener un punto neutro en el centro que une todos los finales de las bobinas, quedan sometidas a la misma tensión que entre fase y neutro de la red, Vf = VL / √3 , que si Vf es 400V quedan sometidas a 230V.

Como puedes observar tenemos que tener en cuenta la tensión de alimentación para conectarlo en estrella o en triángulo.
Por ejemplo, un motor que sus bobinas trabajan a 400V en su funcionamiento normal (nominal), si lo queremos conectar a una alimentación trifásica de 400V podemos hacerlo en triángulo perfectamente.
En estrella también pero trabajarían a menor tensión de la de trabajo, trabajarían las bobinas a 230V.
Si ahora es un motor que sus bobinas trabajan a 230V, si lo queremos conectar a una alimentación de 400V solo podríamos conectarlo en estrella, en triángulo quemaríamos las bobinas. ¡¡¡Mucho cuidado con esto!!!.
Pero ¿Cómo sabemos la tensión de trabajo de las bobinas de un motor?
Esta tensión viene en la placa de características. Suele venir expresada de la siguiente manera:
220V/400 --> significa que se puede conectar en estrella a 400V y en triángulo a 220V. La tensión normal de trabajo y máxima que aguantan las bobinas siempre es la que marca en triángulo, en este caso 220V.
Nunca podemos superar esta tensión en las bobinas del motor.
Si este motor lo queremos conectar a una red trifásica de 400V entre fases. ¿Cómo lo deberíamos conectar? Lógicamente en estrella, en triángulo quemaríamos las bobinas, ya que se quedarían a 400V.
¡¡¡Siempre mirar como están las conexiones de las bobinas antes de hacer un arranque de un motor trifásico!!!
Normalmente los motores suelen ser de 400V/690V, porque las redes trifásicas son de 400V y por lo tanto lo puedo conectar en triángulo a las 3 fases y en estrella, aunque en este último caso las bobinas quedarían a 230V funcionando a tensión más baja de lo normal (valdrá para el arranque como luego veremos).
En definitiva:
- 220/380V - Se puede conectar a una red de 220V directamente en triángulo.
En estrella a una red máxima de 380V. OJO nunca en triángulo a una red de 380V
- 380/660V - Se puede conectar a una red de 380V en triángulo y 660V en estrella.
Si lo conectamos en estrella en una red de 380V las bobinas del motor quedan a 230V.
- 400/690V - Se puede conectar a una red de 400V en triángulo y 690V en estrella.
Si lo conectamos en estrella en una red de 400V las bobinas quedan trabajando a 230V.
En la caja de bornes de los motores aparecen los seis terminales correspondientes a los tres devanados del motor más el terminal de conexión a tierra.
La disposición de los terminales siempre se hace de la misma forma, siguiendo las normas internacionales.
Para conseguir la conexión en estrella, basta con unir con unos puentes los finales Z-X-Y.
La conexión en triángulo se consigue realizar con facilidad al unir con unos puentes los terminales (U-Z), (V-X), (W-Y).
Para cambiar el sentido de giro del motor solo hay que cambiar el orden de una de las fases. Fíjate en el siguiente esquema:

Estos motores asíncronos arrancan sin ayuda, pero es necesario controlar la corriente y tensiones producidas en el rotor en el arranque ya que pueden ser muy elevadas.
Puedes ver esto más amplio en la web: Arranque Estrella-Triángulo
Arranque de los Motores Trifásicos
Cuando se conecta el motor directamente a la red, éste absorbe una intensidad muy fuerte de la línea en el momento del arranque, lo que puede afectar no sólo a la duración de los aparatos de conexión, sino a la línea que suministra energía eléctrica.
Estas fuertes corriente sobrecargan las líneas de distribución, por lo que pueden producir caídas de tensión y calentamiento en los conductores de tales líneas. Por esta razón el REBT (reglamento electrotécnico de baja tensión) establece normas para reducir dichas corrientes de arranque a valores que sean aceptables.
En la instrucción técnica ITC-BT-47 se establece la relación máxima entre la corriente de arranque y la de plena carga para motores de C.A.

Normalmente para reducir esta corriente de arranque de un motor se hace reduciendo su tensión.
Hay que tener en cuenta que la disminución de la tensión del motor hace también disminuir su par motor.
Hay varios métodos para reducir la corriente de arranque reduciendo la tensión del moto: arranque estrella-triángulo, arranque con resistencias estatóricas, arranque por autotransformador y arrancadores estáticos.
Fíjate la curva característica de un motor trifásico y la intensidad que absorbe en cada momento el motor:

Veamos ahora los tipos de arranques más utilizados.
Arranque Directo Motor Trifásico
Es el que se presenta cuando suministramos directamente al motor su tensión nominal.
Solo está permitido para motores de pequeña potencia, 4 ó 5 CV y cuya relación Iarranque /Inominal sea igual o inferior a 4,5.
Los motores con arranque directo absorben una gran punta de corriente en el momento del arranque, del orden de 4,5 a 7 veces la intensidad nominal y esto produce un par de arranque del orden de 1,5 a 2 veces el par nominal, lo que permite arrancar estos motores a plena carga.
El arranque directo se efectuará en estrella o en triángulo, según los valores de la tensión de red y las tensiones nominales del motor en cada tipo de conexión, como vimos anteriormente.
Estas conexiones en estrella o triángulo se realizan en el motor sobre su propia placa de bornes.
A continuación se muestra el esquema de fuerza y mando para el arranque directo de un motor asíncrono trifásico de rotor en cortocircuito.

Al pulsar el pulsador S2 se activa la bobina del contactor KM1 y hace que se cierren los contactos de fuerza de KM1 arrancando el motor.
Además el contacto abierto del KM1 13-14 se cierra y aunque soltemos el pulsador S2 la bobina queda con alimentación por un contacto de ella misma (retroalimentación o enclavamiento).
Normalmente este esquema se mejora con elementos de protección como son un guardamotor o interruptor magnetotérmico para proteger el motor contra sobreintensidades y cortocircuitos y un relé térmico para proteger el motor de sobrecalentamientos.
Todos los componentes de un automatismo como el de los motores trifásicos los puedes ver explicados en la siguiente página: Automatismos.

Arranque Estrella-Triángulo
Este método es el método más usado y conocido de todos. Sirve para el arranque de motores menores de 11Kw de potencia eléctrica.
Si conectamos en estrella las bobinas quedan trabajando a una tensión raíz de 3 veces menor a la de trabajo en triángulo, que es la normal de trabajo del motor. Recuerda, Tensión en estrella = Tensión en triángulo/√3.
Esto significa que la corriente por las bobinas del motor cuando están conectadas en estrella es 3 veces menos que en triángulo.
Estas 3 impedancias o bobinas en triángulo consumen el triple de corriente de línea que en estrella, a la misma tensión de red. En la conexión estrella-triángulo se reduce 3 veces la corriente de arranque del motor arrancando el motor en estrella.
Lo que se suele hacer en los motores trifásicos es arrancarlos inicialmente en estrella y pasado un tiempo se pasa a triángulo (3 o 4 segundos).
Se llama arranque estrella-triángulo.
Se trata de que en el arranque el motor vaya cogiendo revoluciones poco a poco, en estrella, y después de un tiempo se ponga en marcha normal, en triangulo.
Fíjate en las gráficas o curvas de este tipo de arranque.

Ahora veamos un esquema para este tipo de arranque de motores.
El Esquema de Fuerza seria:

En el arranque se debe conectar el contactor K1 y el K3 (estrella), pasados unos segundos se conecta en triángulo con el K1 y el K2.
Este circuito es el Circuito de Fuerza (salida).
Y ahora veamos como seria el circuito de mando o control:

F2 es simplemente un interruptor térmico que pararía el motor si su temperatura se eleva mucho. S1 sería el pulsador de arranque y S2 el de paro.
KA1 es un bobina (relé) que se activa a la desconexión, es decir cuando le llega corriente a la bobina del contactor KA1 cambian de posición los contactos (se activa KM3), pasado 3 segundos vuelven a su posición (se desactiva KM3 y se activa KM2).
Este contactor hace el cambio de estrella a triángulo. El contactor KM1 siempre está activado a no ser que paremos el motor con S2 o que salte el relé térmico.
Recuerda: temporizados con retardo a la conexión ((TON, Timer ON Delay), temporizados a la desconexión ((TOF, Timer OFF Delay) y temporizados a la conexión y desconexión.
Puedes entender los contactores temporizados en este video: Temporizadores.
Resumiendo: al pulsar S1 se activa KM1 y KM3 y el motor queda en conexión estrella, al cabo de unos segundos se quedan activados KM1 y KM2 quedando funcionando de forma permanente el motor en triángulo.
Arranque Por Resistencias Estatóricas
Consiste en reducir la tensión que producen las resistencias conectadas en serie con el estator.
Al estar en serie las resistencias nuevas y las internas del motor, la tensión total se divide entre las resistencias nuevas y las del motor, quedando las resistencias internas del motor trabajando a menor tensión que la red en el arranque.
Después de 5 segundos se puentean las resistencias de arranque y el motor pasa a la condición normal de operación. Los resistores o resistencias se ajustan para conseguir una reducción del voltaje noiminal (Vn) al 70%.
Este arranque se utiliza en motores de hasta 25Hp.
Vresistencias del bobinado del motor = Vf - Vresistencias nuevas en serie.
Incluso podríamos poner 2 resistencias en serie con las del motor, en la primera fase puentear unas y en la segundo puentear las dos. El arranque se haría en 3 pasos.
Incluso enligar de resistencias podemos poner resistencias variables e ir cambiando su valor hasta reducirlas a 0 ohmios.

Este sistema tiene el inconveniente de que se consigue disminuir la corriente en función lineal de la caída de tensión producida en las resistencias.
Sin embargo, el par queda disminuido con el cuadrado de la caída de tensión, por lo que su aplicación se ve limitada a motores en los que el momento de arranque resistente sea bajo.
La ventaja que tiene es que la eliminación de la resistencia al finalizar el arranque se lleva a cabo sin interrumpir la alimentación del motor y, por tanto, sin fenómenos transitorios.
Arranque por Autotransformador
Consiste en conectar un autotransformador trifásico en la alimentación del motor.
De esta forma se consigue reducir la tensión y con ella la corriente de arranque.
El par de arranque queda reducido en este caso en la misma proporción que la corriente, es decir, al cuadrado de la tensión reducida.
Este sistema proporciona una buena característica de arranque, aunque posee el inconveniente de su alto precio.

Arrancadores Electrónicos
El arrancador electrónico o suave se utiliza para el arranque de manera progresiva del motor asíncrono trifásico.
Hoy en día, gracias a las nuevas tecnologías, se han desarrollado equipos a base de semiconductores de potencia (tiristores) que son capaces de limitar y controlar en todo momento la intensidad de corriente y el par en el periodo de arranque.
Tres pares de SCR (Tiristores) en “conexión antiparalelo” son utilizados para arrancar el motor.
Se utiliza un algoritmo para controlar los disparos por medio de un microprocesador.
También hay arrancadores suaves con pantalla (display) y el acceso para programar los parámetros por botones digitales.

Con estos equipos, además de limitar la corriente de arranque según nuestras necesidades, se evitan los esfuerzos bruscos a los que se somete a los componentes mecánicos del motor, tales como correas, engranajes, acoplamientos mecánicos.
Estos arrancadores consiguen limitar la intensidad de corriente y hacer que el motor desarrolle el par motor adecuado a la carga mecánica a cualquier velocidad gracias a un convertidor de frecuencia que aplica al motor una tensión y frecuencia variables.
De tal forma que, si lo que se desea es mantener el par constante, se le aplica al motor una relación constante de tensión/frecuencia.
El arranque se realiza aplicando una tensión y frecuencia que aumenta progresivamente desde cero hasta sus valores nominales.
A este tipo de dispositivos se lo conoce por el nombre de arrancadores suaves.
Con ellos es posible programar diferentes curvas de arranque y así poder atender a cargas de tipo variable.

Inversión de Giro de un Motor Trifásico
Para conseguir invertir el sentido de giro del motor es necesario invertir también el sentido del campo giratorio.
Esto se consigue invirtiendo la conexión de dos de las fases del motor.
Esta maniobra se realiza normalmente utilizando automatismos a base de contactores.

Regulación de la Velocidad de los Motores Trifásicos
Un motor de inducción trifásico es básicamente un motor de velocidad constante por lo que es algo difícil controlar su velocidad.
El control de velocidad del motor de inducción se realiza a costa de una disminución de la eficiencia y un bajo factor de potencia eléctrica.
Aún así a veces necesitamos controlar la velocidad.
Recuerda que la velocidad de un motor es:
ns = (60 x F) / p
Por lo que si queremos cambiar la velocidad de un motor tendremos que o cambiar el número de polos (n) o cambiar la frecuencia de la corriente que lo alimenta. Si conseguimos modificar una de estas dos variables habremos conseguido controlar la velocidad.
Mediante tiristores, se puede regular la frecuencia de alimentación del motor. Con ello se consigue modificar entre amplios límites la velocidad del motor.
Motor de dos velocidades conexión Dahlander
El motor de dos velocidades tiene las mismas características constructivas que el motor normal, su diferencia esta únicamente en el bobinado, pues mientras en el motor normal cada bobinado corresponde a una fase, en el motor Dahlander el bobinado de una fase está dividido en dos partes iguales con una toma intermedia.
Según conectemos estas bobinas conseguiremos una velocidad más lenta o más rápida, pues en realidad lo que se consigue es variar el número de pares de polos del bobinado.
En el esquema siguiente se ha representado el circuito de fuerza de un motor trifásico de polos conmutables para dos velocidades en conexión Dahlander.
La velocidad inferior se obtiene cuando el contactor K1M esta únicamente accionado. La velocidad superior se consigue desconectando K1M y accionando en conjunto los contactores K2M y K3M.

Control de Velocidad con Devanados Separados o Independientes
También es posible conseguir dos velocidades de giro diferentes con dos devanados separados.
Cada uno de los devanados posee un número de polos acorde con la velocidad deseada. Dependiendo del devanado que se conecte conseguimos una velocidad u otra.
Es como si fueran dos medios motores.
Durante el arranque, un solo “medio motor” se acopla en directo a plena tensión a la red, lo que divide aproximadamente por dos tanto la corriente de arranque como el par.
No obstante, el par es superior al que proporcionaría el arranque estrella-triángulo de un motor de jaula de igual potencia.
Al finalizar el arranque, el segundo devanado se acopla a la red.
En ese momento, la punta de corriente es débil y de corta duración, ya que el motor no se ha separado de la red de alimentación y su deslizamiento ha pasado a ser débil.
Este sistema, poco utilizado en Europa, es muy frecuente en el mercado norteamericano.


Cuando se acciona el contactor KM1 el motor marcha a velocidad más lenta. Al desconectar KM1 y conectar KM2, el motor funciona a la velocidad más alta.
Si te intersa la conexión de los bornes en la caja de bornes de otro tipo de motores, como el dahlander, el de rotor bobinado, el de 9 o 12 bornes, visita la web: Conexión Bornes Motores.
Si te ha gustado haz click en Compartir, Gracias.
¡¡¡SI QUIERES APRENDER FÁCILMENTE LAS MÁQUINAS ELÉCTRICAS TE RECOMENDAMOS ESTE FANTÁSTICO LIBRO!!!:
© Se permite la total o parcial reproducción del contenido, siempre y cuando se reconozca y se enlace a este artículo como la fuente de información utilizada.
Están diseñados para trabajar con corriente alterna (ca) trifásica, corriente utilizada en mucha aplicaciones industriales.
El motor trifásico más utilizado es el motor asíncrono trifásico de inducción que funciona gracias a los fenómenos de inducción electromagnética, que relacionan la electricidad con el magnetismos y que luego veremos.
Son los más utilizados en la industria por su sencillez, robustez y fácil mantenimiento.
Primero veamos un resumen de la corriente alterna trifásica que utilizan y del campo magnético, muy importante para entender su funcionamiento.
Pero antes de empezar, déjame recomendarte el mejor libro para aprender los automatismos eléctricos:
Libro Máquinas Eléctricas
Corriente Trifásica
A diferencia de los sistemas monofásicos de C.A., que utilizan dos conductores eléctricos (Fase y Neutro) para su distribución y consumo, los sistemas trifásicos utilizan tres o cuatro conductores.
3 Fases o 3 Fases + Neutro.
Al trabajar con 3 fases y el neutro podemos obtener 2 tensiones diferentes.
Normalmente 230V entre fase y neutro y 400V entre dos fases.
La tensión entre 2 fases es siempre la raíz de 3 veces superior a la de una fase con el neutro:
400/230 = √3
La tensión más elevada se suele utilizar en la industria y para los motores, y la más baja para uso doméstico y alumbrado.
El generador que produce la corriente trifásica se llama alternador y genera 3 fuerzas electromotrices (fem = tensiones), una en cada fase con los siguientes valores instantáneos:
e1 = Emáxima x seno wt
e2 = Emáxima x seno (wt-120º)
e3 = Emáxima x seno (wt-240º)
Siendo e la tensión instantánea, y Emáxima la máxima de la curva senoidal de la onda.
¿Qué significa esto?
Pues que los valores de las 3 tensiones (una de cada fase) están desfasadas 120º una respecto a la otra en el tiempo.
A las 3 intensidades les pasa lo mismo.
Fíjate en la gráfica como sería:
Si quieres saber más sobre la corriente alterna visita: Circuitos de Corriente Alterna.
Ventajas del Uso de Corriente Alterna Trifásica
- La primera ventaja es la posibilidad de utilizar 2 tensiones diferentes, de la que ya hablamos antes.
- Tanto los alternadores como los transformadores y motores de C.A. trifásicos poseen un mayor rendimiento y, por lo general, son mucho más sencillos y económicos que los monofásicos.
Esto se aprecia fundamentalmente en los motores trifásicos de inducción, los más utilizados en el sector industrial y los que vamos a estudiar en esta página.
Este motor posee unas características mucho mejores que el motor monofásico, como: par de arranque muchísimo más fuerte, mejor rendimiento y mejor factor de potencia.
- Los sistemas trifásicos consiguen transportar la energía eléctrica con un ahorro considerable en la sección de los conductores.
Todas estas ventajas hacen que en la actualidad toda la energía eléctrica se produzca, transporte, distribuya y consuma sea en forma de corriente alterna trifásica.
Campo Magnético
Un campo magnético es una región del espacio donde existen fuerzas magnéticas, fuerzas que atraen o repelen metales.
También se puede definir como la región del espacio donde existe magnetismo (fuerzas magnéticas).
Un imán por ejemplo tiene a su alrededor un espacio donde si colocamos una sustancia metálica, esta se verá atraída por el imán.
El campo lo podemos representar por líneas que llamaremos líneas del campo magnético.
La fuerza con la que es atraída la sustancia magnética al soltarla dentro del campo magnético dependen de la fuerza que tenga el imán y de la región del campo donde la coloquemos.
No será igual la fuerza de atracción cerca del imán que en el borde del campo magnético.
Pero un campo magnético no solo lo crea un imán.
Un conductor al que le atraviesa una corriente genera alrededor de el un campo magnético, igual al de un imán.
Si el conductor lo enrollamos en forma de espira (bobina), el campo magnético será mayor, y si además estas espiras están enrolladas alrededor de un metal (electroimán) será todavía mayor el campo magnético.
Estos campos son campos magnéticos generados por medo de la electricidad.
También hay que recordar que los generadores de campos magnéticos (y el propio campo) tienen 2 polos, uno positivo y otro negativo y si juntamos dos campos magnéticos iguales (del mismo polo) los campos generan una fuerza de repulsión, pero si los polos de los campos son opuestos se genera un fuerza de atracción entre los campos.
En un conductor al que le atraviesa una corriente, los polos del campo generado dependen del sentido en el que entre y salga la corriente por el conductor.
Luego veremos más sobre esto.
Imanes con polos iguales se repelen, de polos opuestos se atraen.
Con estos conocimientos ya estamos preparados para entender el motor eléctrico trifásico.
Si quieres saber más sobre esto te recomendamos este enlace: Campo Magnético.
Funcionamiento de Un Motor Trifásico
Un motor asíncrono trifásico consta de 2 partes principales (fíjate en la imagen de más abajo):
- Parte Fija o Estator: Es la parte fija del motor.
Está constituido por una carcasa en la que está fijada una corona de chapas de acero al silicio provistas de unas ranuras.
Las espiras de los bobinados están dispuestas en dichas ranuras formando electroimanes y en tantos circuitos como fases tenga la red a la que se conectará la máquina.
En nuestro caso, los motores trifásicos, 3 bobinas y circuitos diferentes (un circuito por bobina).
Esta parte, los electroimanes que forman el estator, es la que creará el campo magnético giratorio como luego veremos, por eso también se llama Inductor, ya que inducirá una corriente en la otra parte, o lo que es lo mismo, inducirá el movimiento, como más adelante explicaremos.
- Parte Móvil o Rotor: Es la parte móvil del motor.
Esta situado en el interior del estator y consiste en un núcleo de chapas de acero al silicio apiladas que forman un cilindro, o de un bobinado eléctrico dependiendo del tipo de roto, Rotor de jaula de ardilla o Rotor bobinado.
También se llama inducido porque es donde se inducirán las tensiones, corrientes y por lo tanto el movimiento de nuestro motor.
El rotor en jaula de ardilla, el más utilizado, es un rotor con una serie de barras de aluminio o cobre (conductores) a su alrededor y unidas en cortocircuito por dos anillos en sus extremos.
El de rotor bobinado es un rotor con bobinas a su alrededor.
El campo magnético (las líneas del campo magnético) giratorio trifásico del estator cortará las varillas o chapas del rotor, en estas se induce una fuerza electromotriz (tensión) que al estar en cortocircuito se genera una corriente por ellas, corriente inducida que genera un campo que seguirá al del estator girando el rotor.
Pero....¿Por qué?
Para entenderlo tenemos que estudiar 3 descubrimientos de 3 grandes físicos.
Faraday descubrió que un conductor eléctrico moviéndose dentro de un campo magnético (imán) generaba una tensión o diferencial de potencial (d.d.p) entre sus dos extremos (igual que la pila tiene tensión entre sus dos extremos).
Como este voltaje es un voltaje inducido se le llama fuerza electromotriz (fem), en lugar de tensión.
Si unimos los extremos, por ejemplo en cortocircuito o con una bombilla, circulará una corriente por el conductor.
Mientras al mover el conductor cortemos líneas del campo magnético del imán se mantendrá en los extremos del conductor una fem si el circuito está abierto.
Si cerramos el circuito (por ejemplo conectamos una lámpara al conductor) la fem producirá una corriente por el conductor.
Esta tensión generada en la espira al ser inducida se conoce como fuerza electromotriz inducida (fem), pero simplemente es una tensión entre dos puntos.
Si cortocircuitamos las espiras, se generará por la espira una corriente inducida (corriente de cortocircuito).
Nikola Tesla descubrió que una corriente alterna trifásica genera un campo magnético giratorio al circular la corriente de cada una de las 3 fases por una bobina de un electroimán diferente (imán con bobina enrollada = electroimán).
Fíjate en la siguiente animación:
Cuando la corriente es de valor 0 no hay campo en esa fase, luego va aumentando y cada medio ciclo de la onda el campo cambia de sentido.
Vamos a ver 3 puntos muy concretos:
En el momento o punto 1, habrá 3 campos creados, dos negativos creados por L2 y L3 y uno positivo creado por L1 y que al tener la corriente el valor máximo será el campo máximo que puede crear L1.
La suma vectorial de los 3 campos nos da el vector de color negro dentro del motor.
En el punto 2 ahora será L2 la que crea el campo máximo y los otros dos serán negativos.
La suma de los 3 dan como resultado el vector en esa posición. Se puede comprobar como ha girado.
En la posición 3 el máximo campo lo crea L3 y los otros dos son negativos. El vector del campo y el campo sigue girando.
Ya tenemos nuestro campo giratorio creado por las corrientes trifásicas.
Si quieres ver otra animación aquí tienes otra muy buena: Campo Giratorio.
En nuestro motor el campo magnético generado en el estator está en movimiento y sus líneas de campo magnético cortarán las chapas metálicas (conductores) del rotor en jaula de ardilla generando entre ellas una fem, pero que al estar en cortocircuito lo que se generará será una corriente inducida que circulará por las chapas del rotor.
También sabemos que Oersted demostró que si un conductor por el que circula una corriente eléctrica se encuentra dentro de un campo magnético y sus líneas de campo cortan al conductor, el conductor se desplaza perpendicularmente al campo magnético, es decir se crea una fuerza en el conductor que hace que este se mueva.
Una corriente por conductor + campo magnético = movimiento del conductor.
Realmente la corriente que circula por el conductor lo que hace es crear a su alrededor un campo magnético, como descubrió Oersted, y al interactuar el campo del imán con el campo creado en el conductor, se produce su movimiento (sería como si fueran 2 imanes).
Recuerda dos imanen enfrentados = fuerza de atracción o repulsión.
Según el sentido de la corriente por el conductor (entre o salga) el campo creado tendrá una polaridad o la contraria, por ese motivo, los campos se atraerán o repelerán, haciendo que el conductor se mueva un sentido o en otro (depende del sentido de la corriente por el conductor).
Si el conductor en lugar de ser un único conductor fuera una espira, sobre la espira se crearían 2 fuerzas de sentido contrario (par de fuerzas), porque por un lado de la espira la corriente tiene un sentido (entra) y por el otro lado tiene sentido contrario (sale) a la del otro lado de la espira, haciendo que la espira gire.
El par de fuerzas genera un Momento o Par que produce el giro de la espira.
Ahora ya estamos preparados para explicar el funcionamiento:
¿Por qué Gira un Motor Trifásico?
En nuestro motor trifásico tenemos un estator con un campo magnético giratorio (según Tesla), que corta unos conductores o chapas del rotor por los que se genera una tensión inducida llamada fem (Faraday) y que al estar estos conductores o chapas en cortocircuito se produce por ellos la circulación de una corriente inducida y se crea a su alrededor un campo magnético.
Como por las chapas del rotor (conductores) circula una corriente, se crea en ellas campos magnéticos inducidos y estos campos crean pares de fuerza en el rotor (Oersted) que hace que ¡¡¡El Rotor se Mueva o Gire!!! (Oersted).
Ya tenemos nuestro motor trifásico funcionando.
El campo magnético creado en el rotor seguirá al del estator, pero nunca logrará alcanzarlo, ya que es ese caso las líneas del campo del estator no cortarían las chapas del rotor y no se produciría corriente inducida.
Por eso se llaman "motores asíncronos", la velocidad del rotor y la del campo del estator no están sincronizadas.
Además, se llama motor de inducción porque el estator induce una corriente en el rotor para que funcione. "Motor Asíncrono Trifásico de Inducción".
La corriente inducida por las chapas del rotor lo que realmente crean es un campo magnético a su alrededor, campo que se moverá girando para seguir al campo giratorio del estator trifásico.
Es como si tuviéramos dos imanes.
Fíjate como gira el rotor de la siguiente animación cuando alimentamos con corriente trifásica el estator.
Aunque en la animación se vea el rotor como un imán, en la realidad es un rotor de jaula de ardilla, pero que como ya vimos se crea en el un campo magnético, con lo que se convierte en un imán.
Se define el deslizamiento de un motor asíncrono como la diferencia de estas velocidades expresada en tantos por ciento:
S = [(ns - n)/ns] x 100
S = deslizamiento en tanto por ciento %.
ns = velocidad síncrona del campo magnético del estator.
n = velocidad del rotor.
Un motor asíncrono trifásico de rotor en cortocircuito posee una velocidad síncrona de 3.000 r.p.m.
¿Cuál será el deslizamiento del rotor a plena carga si se mide con un tacómetro una velocidad de 2.850 r.p.m.?
S = [3000-2850/3000] = 5%.
El estator de un motor asíncrono trifásico se construye de tal forma que se alojan tres bobinas desfasadas entre sí 120º.
Cada una de estas bobinas se conecta a cada una de las fases de un sistema trifásico, por lo que por cada una de ellas circularán las corrientes instantáneas i 1 , i2 e i3.
Cuando aumenta la carga en el rotor del motor, la velocidad del rotor decrece, con lo que aumenta el deslizamiento.
Esto provoca que el flujo del estator corte las barras de rotor a mayor velocidad, y por consiguiente se incrementa mucho la intensidad en el rotor y el "par motor" para vencer el "par resistente" de la carga.
Esto es lo que ocurre por ejemplo en el arranque de los motores, en los que podemos llegar a tener intensidades absorbidas por el motor 7 veces mayores que una vez en marcha el motor.
La velocidad del rotor no disminuye mucho cuando aumenta la carga, es decir los deslizamientos de los motores trifásicos no suelen ser muy grandes.
La velocidad síncrona del campo giratorio depende del número de polos con el que se construyan los devanados en el estator y de la frecuencia de la red a la que se conecte (En España 50Hz en América 60Hz):
ns = (60 x F) / p
ns = velocidad síncrona del campo giratorio del estator.
F = Frecuencia de la red trifásica en Hertzios (Hz).
p = Número de pares de polos del estator. El mínimo sería 1 par de polos (Norte-Sur). Más adelante veremos la diferencia entre un motor de 1 par de polos y de 2 pares de polos.
Por ejemplo, si se tiene una máquina de 1 par de polos (2 polos) trabajar a 3.000rpm a 50hz, de 2 pares de polos (4 polos) la máquina girará a 1.500 revoluciones por minuto.
Si fuera de 3 pares de polos sería de 1000rpm y si fuera de 4 pares de polos sería de 750rpm.
Los polos tienen que ver con el número de bobinas que tenemos por cada fase en el bobinado del estator. Más abajo en el bobinado de los motores lo puedes ver.
Normalmente sabiendo la velocidad del motor, que viene en la placa de características, lo que hacemos es averiguar el número de polos del motor.
La potencia absorbida (o nominal) de un motor, la que viene en la placa de características, es:
Pabs = √3 x Vn x In x cose fi
Pero esta potencia no se transmite por completo en el eje del motor porque los motores tienen pérdidas. Las perdidas principales son:
- Pérdidas en el Cobre, debidas a la resistencia de los bobinados.
- Pérdidas en el hierro, debidas a la histéresis y a las corrientes parásitas o de Foucault.
- Pérdidas mecánicas, debidas a los elementos giratorios por rozamientos.
El rendimiento (η) de un motor es:
η = (Pútil / Pabsorbida) x 100; en tanto por ciento.
La potencia útil`, si ponemos el rendimiento en número, no en porcentaje (por ejemplo rendimiento de 0,87, en lugar del 87%) será:
Pu = η x Pabsorbida = η x √3 x Vn x In x cose fi;
Recuerda 1CV = 736 vatios (w), en muchos problemas viene la potencia expresada en caballos de vapor.
Arranque, Aceleración y Carga del Motor Trifásico
Cuando el motor pasa de funcionar en vacío a arrastrar una carga mecánica, el rotor tiende a frenarse por el par resistente que produce la carga contrario al giro del rotor.
Esto hace que el movimiento relativo del campo magnético giratorio respecto al rotor aumente, lo que produce un aumento de la f.e.m. y de la corriente inducida en los conductores o chapas del rotor.
Dado que el par de fuerzas que se desarrolla en el rotor o par motor depende de esta corriente, se produce un aumento de dicho par que tiende a equilibrar el par resistente con el par motor hasta alcanzar el punto de equilibrio que sería el Par Nominal Mn.
De aquí se entiende que según aumenta la carga en el motor, también aumente el deslizamiento y el par motor.
La característica del motor nos indica la relación entre el par del motor y su velocidad.
El par que desarrolla un motor de inducción esta íntimamente relacionado con la velocidad del rotor.
Dado que su relación matemática resulta un poco complicada, por lo general, esta relación se expresa gráficamente mediante una curva característica de par-velocidad.
La curva del motor par-velocidad nos determina su funcionamiento.
Curva Par-Velocidad
A continuación podemos ver la curva de un motor con el par motor (Mm) y el par resistente (Mi) en función de su velocidad (n).Par Resistente = Par de la Carga del Motor, por ejemplo un eje al que se le ha acoplado un montacargas.
Al principio el par resistente es menor que el motor, en caso contrario el motor no podría arrancar.
La curva del Par resistente debe ser siempre menor que la del motor, en caso contrario el motor no podría girar
Como el par motor es mayor que el resistente el motor se acelera, aumentando el Resistente y el Motor haciendo la curva de la gráfica.
En el momento en el que las 2 curvas se juntan se igualen los pares y ahí es donde se quedará funcionando el motor, el Par Nominal.
Si te fijas en la velocidad (n) es un poco menor que la de sincronismo, ya que si alcanzara esta velocidad como sabes dejaría de funcionar.
Funcionamiento Nominal= funcionamiento del motor en condiciones normales de operación para el que fue diseñado, es decir donde trabaja normalmente.
El par nominal, la intensidad nominal, la velocidad nominal, etc. serán valores en ese punto.
Los motores en el arranque tienen condiciones de arranque diferentes hasta que se estabiliza y funciona en su estado normal, o nominal.
El par nominal, nos da la potencia nominal y la intensidad nominal o viceversa.
Par nominal = Mn = Pu / w; potencia útil partido por la velocidad angular en radianes/segundo;
w = (2π/60) x Velocidad Nominal en rpm (n)
Mn = (Pu x 60) / (2π x n) = Newton x metros
En la curva mostrada como ejemplo se puede observar que en el momento del arranque del motor (n = 0rpm) se obtiene un par de arranque 1,5 veces mayor que su par nominal (Mn).
Si hacemos que este motor arrastre una carga que origine un par resistente Mi, el motor adaptará su velocidad hasta conseguir desarrollar un par motor Mn que consiga arrastrar la carga mecánica.
Esto se consigue a la velocidad "n" nominal.
En el caso de que aplicásemos un par resistente mayor, la velocidad disminuiría hasta que se alcanzara el equilibrio entre el par motor y el par resistente.
En el caso de que el par resistente fuese mayor que el par máximo que puede desarrollar el motor (en nuestro ejemplo: Mmáx = 2,5Mn) el motor se pararía.
Ejercicio: Un motor asíncrono trifásico posee las siguientes características: potencia eléctrica absorbida de la red 8 kW; 400 V; 50 Hz; cos de fi 0,85; rendimiento del 93%; pares de polos del devanado estatórico 2; deslizamiento a plena carga del 4%.
Calcular el par de rotación del rotor.
¿Cuál sería el par de arranque y el par máximo de este motor si su característica mecánica es la que se muestra en la figura siguiente?
La mayoría de las características de los motores eléctricos se suele expresar en la propia placa de características del motor, tal como tensiones, potencia, frecuencia, velocidad, nivel de protección, clase de aislamiento, factor de potencia, tipo de servicio, etc.
La Intensidad Nominal del Motor se puede obtener de la potencia nominal o absorbida (son la misma):
Pn = √3 x η x Vn x In x x cos fi; donde η es el rendimiento del motor a plena carga.
Ejercicio: Se desea conectar a una red trifásica de 400V un motor trifásico de inducción de 230/400V, 50Hz y 22Kw de potencia nominal, rendimiento a plena carga del 91,7% (0,917), factor de potencia 0,88 y 2.945rpm de velocidad nominal.
¿Qué intensidad absorberá de la linea?
solución : 39,35A
Si queremos obtener otros datos, como el comportamiento en servicio a diferentes regímenes de carga, tendremos que recurrir a las características que se facilitan en las informaciones técnicas que proporcionan los propios fabricantes de los motores.
En la Tabla 20.1 se muestran, a modo de ejemplo, las características técnicas de una gama de motores asíncronos trifásicos comerciales con rotor en cortocircuito de un par de polos y 50 Hz.
Debajo tenemos una comprobación para ver si los datos de intensidad son correctos.
Curva de la Intensidad del Motor con el Par
A la curva estudiada anteriormente le hemos añadido la curva de la intensidad en cada momento según velocidad del motor.Si te fijas en el arranque la intensidad es muy alta, puede llegar a 7 u 8 veces la nominal.
Según se va acelerando baja el valor de la intensidad absorbida por el motor, hasta llegar a la nominal.
Conexiones de los Bobinados del Estator en un Motor Trifásico
El devanado o bobinado trifásico del estator de un motor asíncrono son las bobinas donde se conectará cada fase.
Las bobinas están distribuidas en 3 fases y se distribuyen en las ranuras del interior de la circunferencia del estator.
Cada una de las 3 bobinas del estátor tienen dos mitades colocadas en posiciones diagonalmente opuestas respecto al estator.
Cada mitad creará un polo del campo magnético (norte y sur).
Las bobinas están desfasadas 120º entre si. El sentido de arrollamiento de las bobinas es tal que, cuando la corriente pasa a través de ellas, se induce un campo magnético a través del rotor.
En este caso cada bobina tiene 2 polos, con lo que el motor será bipolar.
Todas las bobinas que se conectan a la misma fase están unidas en serie formando una única bobina o bobinado, con un principio y un final.
Como tenemos 3 fases, tenemos 3 principios y 3 finales, en total 6 extremos, terminales o bornes para conectar. Incluso si las bobinas de una misma fase estuvieran conectadas en paralelo (algunas veces puede ser así) también tendríamos 3 principios y 3 finales.
Fíjate en la siguiente imagen.
Tienes un bobinado de un motor de 2 pares de polos y después conexiones de las bobinas en estrella y en triángulo.
Los terminales también se suelen llamar U1-V1-W1 los principios de los bobinados y U2-V2-W2 los finales.
Si te intersa la conexión de los bornes en la caja de bornes de otro tipo de motores, como el dahlander, el de rotor bobinado, el de 9 o 12 bornes, visita la web: Conexión Bornes Motores.
Bobinado de los Motores Trifásicos: No vamos a explicar demasiado sobre este tema ya que es una aspecto constructivo y poco nos interesa.
Simplemente te dejamos un esquema de como sería el bobinado de un estator de 36 en cada ranura iría una bobina y las bobinas irían unidas según el esquema.
El número de polos resultante sería de 2 pares de polos o 4 polos en total.
Como puedes observar tenemos 2 formas diferentes de conectar los extremos de las bobinas del estator llamadas Conexión Estrella y Conexión Triángulo.
Pero...¿Cual es la diferencia eléctrica entre una y otra?
Recuerda: Tensión de fase: es la tensión entre una fase y el neutro. Tensión de línea: es la tensión que existe entre dos fases. La VL = √3 x Vf. Si la de fase es 230, la de línea es de 400V.
Al conectar las bobinas del motor en triángulo, las bobinas quedan alimentadas a la misma tensión que la red de alimentación. Si es una alimentación trifásica de 400V (Vlinea), las bobinas del motor quedan sometidas a esa misma tensión 400V.
Al conectar las mismas bobinas en estrella, al tener un punto neutro en el centro que une todos los finales de las bobinas, quedan sometidas a la misma tensión que entre fase y neutro de la red, Vf = VL / √3 , que si Vf es 400V quedan sometidas a 230V.
Como puedes observar tenemos que tener en cuenta la tensión de alimentación para conectarlo en estrella o en triángulo.
Por ejemplo, un motor que sus bobinas trabajan a 400V en su funcionamiento normal (nominal), si lo queremos conectar a una alimentación trifásica de 400V podemos hacerlo en triángulo perfectamente.
En estrella también pero trabajarían a menor tensión de la de trabajo, trabajarían las bobinas a 230V.
Si ahora es un motor que sus bobinas trabajan a 230V, si lo queremos conectar a una alimentación de 400V solo podríamos conectarlo en estrella, en triángulo quemaríamos las bobinas. ¡¡¡Mucho cuidado con esto!!!.
Pero ¿Cómo sabemos la tensión de trabajo de las bobinas de un motor?
Esta tensión viene en la placa de características. Suele venir expresada de la siguiente manera:
220V/400 --> significa que se puede conectar en estrella a 400V y en triángulo a 220V. La tensión normal de trabajo y máxima que aguantan las bobinas siempre es la que marca en triángulo, en este caso 220V.
Nunca podemos superar esta tensión en las bobinas del motor.
Si este motor lo queremos conectar a una red trifásica de 400V entre fases. ¿Cómo lo deberíamos conectar? Lógicamente en estrella, en triángulo quemaríamos las bobinas, ya que se quedarían a 400V.
¡¡¡Siempre mirar como están las conexiones de las bobinas antes de hacer un arranque de un motor trifásico!!!
Normalmente los motores suelen ser de 400V/690V, porque las redes trifásicas son de 400V y por lo tanto lo puedo conectar en triángulo a las 3 fases y en estrella, aunque en este último caso las bobinas quedarían a 230V funcionando a tensión más baja de lo normal (valdrá para el arranque como luego veremos).
En definitiva:
- 220/380V - Se puede conectar a una red de 220V directamente en triángulo.
En estrella a una red máxima de 380V. OJO nunca en triángulo a una red de 380V
- 380/660V - Se puede conectar a una red de 380V en triángulo y 660V en estrella.
Si lo conectamos en estrella en una red de 380V las bobinas del motor quedan a 230V.
- 400/690V - Se puede conectar a una red de 400V en triángulo y 690V en estrella.
Si lo conectamos en estrella en una red de 400V las bobinas quedan trabajando a 230V.
En la caja de bornes de los motores aparecen los seis terminales correspondientes a los tres devanados del motor más el terminal de conexión a tierra.
La disposición de los terminales siempre se hace de la misma forma, siguiendo las normas internacionales.
Para conseguir la conexión en estrella, basta con unir con unos puentes los finales Z-X-Y.
La conexión en triángulo se consigue realizar con facilidad al unir con unos puentes los terminales (U-Z), (V-X), (W-Y).
Para cambiar el sentido de giro del motor solo hay que cambiar el orden de una de las fases. Fíjate en el siguiente esquema:
Estos motores asíncronos arrancan sin ayuda, pero es necesario controlar la corriente y tensiones producidas en el rotor en el arranque ya que pueden ser muy elevadas.
Puedes ver esto más amplio en la web: Arranque Estrella-Triángulo
Arranque de los Motores Trifásicos
Cuando se conecta el motor directamente a la red, éste absorbe una intensidad muy fuerte de la línea en el momento del arranque, lo que puede afectar no sólo a la duración de los aparatos de conexión, sino a la línea que suministra energía eléctrica.
Estas fuertes corriente sobrecargan las líneas de distribución, por lo que pueden producir caídas de tensión y calentamiento en los conductores de tales líneas. Por esta razón el REBT (reglamento electrotécnico de baja tensión) establece normas para reducir dichas corrientes de arranque a valores que sean aceptables.
En la instrucción técnica ITC-BT-47 se establece la relación máxima entre la corriente de arranque y la de plena carga para motores de C.A.
Normalmente para reducir esta corriente de arranque de un motor se hace reduciendo su tensión.
Hay que tener en cuenta que la disminución de la tensión del motor hace también disminuir su par motor.
Hay varios métodos para reducir la corriente de arranque reduciendo la tensión del moto: arranque estrella-triángulo, arranque con resistencias estatóricas, arranque por autotransformador y arrancadores estáticos.
Fíjate la curva característica de un motor trifásico y la intensidad que absorbe en cada momento el motor:
Veamos ahora los tipos de arranques más utilizados.
Arranque Directo Motor Trifásico
Es el que se presenta cuando suministramos directamente al motor su tensión nominal.
Solo está permitido para motores de pequeña potencia, 4 ó 5 CV y cuya relación Iarranque /Inominal sea igual o inferior a 4,5.
Los motores con arranque directo absorben una gran punta de corriente en el momento del arranque, del orden de 4,5 a 7 veces la intensidad nominal y esto produce un par de arranque del orden de 1,5 a 2 veces el par nominal, lo que permite arrancar estos motores a plena carga.
El arranque directo se efectuará en estrella o en triángulo, según los valores de la tensión de red y las tensiones nominales del motor en cada tipo de conexión, como vimos anteriormente.
Estas conexiones en estrella o triángulo se realizan en el motor sobre su propia placa de bornes.
A continuación se muestra el esquema de fuerza y mando para el arranque directo de un motor asíncrono trifásico de rotor en cortocircuito.
Al pulsar el pulsador S2 se activa la bobina del contactor KM1 y hace que se cierren los contactos de fuerza de KM1 arrancando el motor.
Además el contacto abierto del KM1 13-14 se cierra y aunque soltemos el pulsador S2 la bobina queda con alimentación por un contacto de ella misma (retroalimentación o enclavamiento).
Normalmente este esquema se mejora con elementos de protección como son un guardamotor o interruptor magnetotérmico para proteger el motor contra sobreintensidades y cortocircuitos y un relé térmico para proteger el motor de sobrecalentamientos.
Todos los componentes de un automatismo como el de los motores trifásicos los puedes ver explicados en la siguiente página: Automatismos.
Arranque Estrella-Triángulo
Este método es el método más usado y conocido de todos. Sirve para el arranque de motores menores de 11Kw de potencia eléctrica.
Si conectamos en estrella las bobinas quedan trabajando a una tensión raíz de 3 veces menor a la de trabajo en triángulo, que es la normal de trabajo del motor. Recuerda, Tensión en estrella = Tensión en triángulo/√3.
Esto significa que la corriente por las bobinas del motor cuando están conectadas en estrella es 3 veces menos que en triángulo.
Estas 3 impedancias o bobinas en triángulo consumen el triple de corriente de línea que en estrella, a la misma tensión de red. En la conexión estrella-triángulo se reduce 3 veces la corriente de arranque del motor arrancando el motor en estrella.
Lo que se suele hacer en los motores trifásicos es arrancarlos inicialmente en estrella y pasado un tiempo se pasa a triángulo (3 o 4 segundos).
Se llama arranque estrella-triángulo.
Se trata de que en el arranque el motor vaya cogiendo revoluciones poco a poco, en estrella, y después de un tiempo se ponga en marcha normal, en triangulo.
Fíjate en las gráficas o curvas de este tipo de arranque.
Ahora veamos un esquema para este tipo de arranque de motores.
El Esquema de Fuerza seria:
En el arranque se debe conectar el contactor K1 y el K3 (estrella), pasados unos segundos se conecta en triángulo con el K1 y el K2.
Este circuito es el Circuito de Fuerza (salida).
Y ahora veamos como seria el circuito de mando o control:
F2 es simplemente un interruptor térmico que pararía el motor si su temperatura se eleva mucho. S1 sería el pulsador de arranque y S2 el de paro.
KA1 es un bobina (relé) que se activa a la desconexión, es decir cuando le llega corriente a la bobina del contactor KA1 cambian de posición los contactos (se activa KM3), pasado 3 segundos vuelven a su posición (se desactiva KM3 y se activa KM2).
Este contactor hace el cambio de estrella a triángulo. El contactor KM1 siempre está activado a no ser que paremos el motor con S2 o que salte el relé térmico.
Recuerda: temporizados con retardo a la conexión ((TON, Timer ON Delay), temporizados a la desconexión ((TOF, Timer OFF Delay) y temporizados a la conexión y desconexión.
Puedes entender los contactores temporizados en este video: Temporizadores.
Resumiendo: al pulsar S1 se activa KM1 y KM3 y el motor queda en conexión estrella, al cabo de unos segundos se quedan activados KM1 y KM2 quedando funcionando de forma permanente el motor en triángulo.
Arranque Por Resistencias Estatóricas
Consiste en reducir la tensión que producen las resistencias conectadas en serie con el estator.
Al estar en serie las resistencias nuevas y las internas del motor, la tensión total se divide entre las resistencias nuevas y las del motor, quedando las resistencias internas del motor trabajando a menor tensión que la red en el arranque.
Después de 5 segundos se puentean las resistencias de arranque y el motor pasa a la condición normal de operación. Los resistores o resistencias se ajustan para conseguir una reducción del voltaje noiminal (Vn) al 70%.
Este arranque se utiliza en motores de hasta 25Hp.
Vresistencias del bobinado del motor = Vf - Vresistencias nuevas en serie.
Incluso podríamos poner 2 resistencias en serie con las del motor, en la primera fase puentear unas y en la segundo puentear las dos. El arranque se haría en 3 pasos.
Incluso enligar de resistencias podemos poner resistencias variables e ir cambiando su valor hasta reducirlas a 0 ohmios.
Este sistema tiene el inconveniente de que se consigue disminuir la corriente en función lineal de la caída de tensión producida en las resistencias.
Sin embargo, el par queda disminuido con el cuadrado de la caída de tensión, por lo que su aplicación se ve limitada a motores en los que el momento de arranque resistente sea bajo.
La ventaja que tiene es que la eliminación de la resistencia al finalizar el arranque se lleva a cabo sin interrumpir la alimentación del motor y, por tanto, sin fenómenos transitorios.
Arranque por Autotransformador
Consiste en conectar un autotransformador trifásico en la alimentación del motor.
De esta forma se consigue reducir la tensión y con ella la corriente de arranque.
El par de arranque queda reducido en este caso en la misma proporción que la corriente, es decir, al cuadrado de la tensión reducida.
Este sistema proporciona una buena característica de arranque, aunque posee el inconveniente de su alto precio.
Arrancadores Electrónicos
El arrancador electrónico o suave se utiliza para el arranque de manera progresiva del motor asíncrono trifásico.
Hoy en día, gracias a las nuevas tecnologías, se han desarrollado equipos a base de semiconductores de potencia (tiristores) que son capaces de limitar y controlar en todo momento la intensidad de corriente y el par en el periodo de arranque.
Tres pares de SCR (Tiristores) en “conexión antiparalelo” son utilizados para arrancar el motor.
Se utiliza un algoritmo para controlar los disparos por medio de un microprocesador.
También hay arrancadores suaves con pantalla (display) y el acceso para programar los parámetros por botones digitales.
Con estos equipos, además de limitar la corriente de arranque según nuestras necesidades, se evitan los esfuerzos bruscos a los que se somete a los componentes mecánicos del motor, tales como correas, engranajes, acoplamientos mecánicos.
Estos arrancadores consiguen limitar la intensidad de corriente y hacer que el motor desarrolle el par motor adecuado a la carga mecánica a cualquier velocidad gracias a un convertidor de frecuencia que aplica al motor una tensión y frecuencia variables.
De tal forma que, si lo que se desea es mantener el par constante, se le aplica al motor una relación constante de tensión/frecuencia.
El arranque se realiza aplicando una tensión y frecuencia que aumenta progresivamente desde cero hasta sus valores nominales.
A este tipo de dispositivos se lo conoce por el nombre de arrancadores suaves.
Con ellos es posible programar diferentes curvas de arranque y así poder atender a cargas de tipo variable.
Inversión de Giro de un Motor Trifásico
Para conseguir invertir el sentido de giro del motor es necesario invertir también el sentido del campo giratorio.
Esto se consigue invirtiendo la conexión de dos de las fases del motor.
Esta maniobra se realiza normalmente utilizando automatismos a base de contactores.
Regulación de la Velocidad de los Motores Trifásicos
Un motor de inducción trifásico es básicamente un motor de velocidad constante por lo que es algo difícil controlar su velocidad.
El control de velocidad del motor de inducción se realiza a costa de una disminución de la eficiencia y un bajo factor de potencia eléctrica.
Aún así a veces necesitamos controlar la velocidad.
Recuerda que la velocidad de un motor es:
ns = (60 x F) / p
Por lo que si queremos cambiar la velocidad de un motor tendremos que o cambiar el número de polos (n) o cambiar la frecuencia de la corriente que lo alimenta. Si conseguimos modificar una de estas dos variables habremos conseguido controlar la velocidad.
Mediante tiristores, se puede regular la frecuencia de alimentación del motor. Con ello se consigue modificar entre amplios límites la velocidad del motor.
Motor de dos velocidades conexión Dahlander
El motor de dos velocidades tiene las mismas características constructivas que el motor normal, su diferencia esta únicamente en el bobinado, pues mientras en el motor normal cada bobinado corresponde a una fase, en el motor Dahlander el bobinado de una fase está dividido en dos partes iguales con una toma intermedia.
Según conectemos estas bobinas conseguiremos una velocidad más lenta o más rápida, pues en realidad lo que se consigue es variar el número de pares de polos del bobinado.
En el esquema siguiente se ha representado el circuito de fuerza de un motor trifásico de polos conmutables para dos velocidades en conexión Dahlander.
La velocidad inferior se obtiene cuando el contactor K1M esta únicamente accionado. La velocidad superior se consigue desconectando K1M y accionando en conjunto los contactores K2M y K3M.
Control de Velocidad con Devanados Separados o Independientes
También es posible conseguir dos velocidades de giro diferentes con dos devanados separados.
Cada uno de los devanados posee un número de polos acorde con la velocidad deseada. Dependiendo del devanado que se conecte conseguimos una velocidad u otra.
Es como si fueran dos medios motores.
Durante el arranque, un solo “medio motor” se acopla en directo a plena tensión a la red, lo que divide aproximadamente por dos tanto la corriente de arranque como el par.
No obstante, el par es superior al que proporcionaría el arranque estrella-triángulo de un motor de jaula de igual potencia.
Al finalizar el arranque, el segundo devanado se acopla a la red.
En ese momento, la punta de corriente es débil y de corta duración, ya que el motor no se ha separado de la red de alimentación y su deslizamiento ha pasado a ser débil.
Este sistema, poco utilizado en Europa, es muy frecuente en el mercado norteamericano.
Cuando se acciona el contactor KM1 el motor marcha a velocidad más lenta. Al desconectar KM1 y conectar KM2, el motor funciona a la velocidad más alta.
Si te intersa la conexión de los bornes en la caja de bornes de otro tipo de motores, como el dahlander, el de rotor bobinado, el de 9 o 12 bornes, visita la web: Conexión Bornes Motores.
Si te ha gustado haz click en Compartir, Gracias.
¡¡¡SI QUIERES APRENDER FÁCILMENTE LAS MÁQUINAS ELÉCTRICAS TE RECOMENDAMOS ESTE FANTÁSTICO LIBRO!!!:
© Se permite la total o parcial reproducción del contenido, siempre y cuando se reconozca y se enlace a este artículo como la fuente de información utilizada.
TAMBIEN TE PUEDE INTERESAR
Arranque Estrella Triangulo
Motores Monofasicos
Condensador de Arranque
Motores de Corriente Alterna
Guardamotor
Motor Anillo Rozantes
Relé Térmico
Transformador Trifasico
Sistemas Trifásicos
Maquinas Electricas
Motores de Corriente Continua
Tipos de Motores Electricos
Automatismos
Ondas Electromagneticas
Motores de Gas
Motor Electrico
El Contactor
Armónicos Eléctricos
Circuitos de Corriente Alterna
Factor de Potencia
Conexión Bornes Motores de Corriente Alterna
El Motor Homopolar
Motores de Gas