
MOTORES ELÉCTRICOS DE CORRIENTE CONTÍNUA
Los motores de corriente continua (cc) pueden variar en tamaño y potencia, desde pequeños motores en juguetes y electrodomésticos, hasta grandes mecanismos que impulsan vehículos, trenes, ascensores y accionan trenes de laminación de acero.
Son motores cada vez más usados en la industria debido a que son muy fáciles de regular su velocidad y que simplemente con cambiar su polaridad cambia su sentido de giro.
Además de estas 2 ventajas también son muy fáciles de controlar su posición, incluyendo la puesta en marcha y el paro total (frenado).
En esta página vamos a estudiar en profundidad cómo son estos motores eléctricos, cómo funcionan y los tipos que hay.
Si te interesan los motores de corriente alterna visita: Motores de Corriente Alterna

¡¡¡SI QUIERES APRENDER FÁCILMENTE LAS MÁQUINAS ELÉCTRICAS TE RECOMENDAMOS ESTE FANTÁSTICO LIBRO!!!:
Libro Maquinas Eléctricas
Índice de Contenidos:
- ¿Qué es un Motor de CC?
- El Electromagnetismo
- Regla de la Mano Izquierda
- ¿Cómo Funciona un Motor de CC?
- Partes de un Motor de Corriente Continua
- El Par Motor
- Intensidades en el Arranque
- Tipos de Motores de Corriente Continua:
- Excitación Independiente
- Motor CC Serie
- Motor CC Derivación
- Motor CC Compound
- Curvas Par-Velocidad-Intensidad
- Otros Motores CC:
- Sin Escobillas
- Paso a Paso
- Universal
- Servomotor
- Los Bornes en los Motores CC
- Potencias en los Motores CC
- Pérdidas Motores CC
- Ensayo en Vacío
- Ensayo en Carga
- Frenado de los Motores CC
- Esquema Inversión de Giro Motor CC
La energía eléctrica que consumen o fuente de alimentación, obviamente es corriente continua, por ejemplo pilas y/o las baterías.
Todo empezó gracias al científico Hans Christian Oersted que comprobó como colocando un cable alrededor o cerca de una brújula, si hacia pasar una corriente por el cable, la aguja de la brújula, que está unida a un imán giratorio, se movía.
Lo que hacía el cable, al que le atravesada una corriente eléctrica, era mover el imán de la brújula que estaba dentro de la espira.
De esta forma demostró la relación que había entre la electricidad y el magnetismo.
Descubrió el electromagnetismo.
Recordamos que un campo magnético es una región del espacio donde existen fuerzas magnéticas (fuerzas que atraen o repelen metales).
Esta propiedad de atraer metales se llama magnetismo.
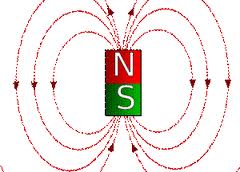
Un campo magnético lo puede generar un imán con dos polos, polo Norte (N) y polo sur (S).
Los polos se encuentran en los extremos del campo generado por el imán.
Antes del descubrimiento de Oersted, ya se sabía que un imán tiene un campo magnético y que cuando le atraviesa (se junta) otro campo magnético, el de otro imán por ejemplo, los imanes se mueve por atracción o repulsión (se atraen o repelen).
Conclusión: si acercas dos imanes, cuando se juntan los campos magnéticos generados por cada uno de ellas, se mueven.
Imanes con polos iguales enfrentados se repelen, polos distintos se atraen.
Pero... ¿Qué demostró Oersted con su experimento?.
Pues algo importantísimo para poder posteriormente crear un motor eléctrico.
Oersted con su experimento dedujo que lo que pasaba era que se creaba un campo magnético alrededor del cable al hacer pasar por él una corriente eléctrica.
¡¡¡Por eso se movía la brújula al pasar corriente por el conductor, porque había 2 campos magnéticos enfrentados!!!
No solo podemos crear un campo magnético con un imán, ahora según el descubrimiento de Oersted, podemos generar un campo magnético por medio de electricidad.
Imán ==> Campo Magnético
Electricidad ==> Campo Magnético
Las dos fuerzas magnéticas, una creada por la corriente por el conductor y la otra por la del propio campo magnético del imán, interactúan haciendo que la aguja de la brújula, que está fija a un imán, girase.
En definitiva había creado un pequeño motor eléctrico.
Metía corriente por el cable y hacía girar un eje, el de la brújula.
Electricidad ==> Campo Magnético ==> Rotación Mecánica
Podemos dejar fijo (estático) el imán y dentro del campo del imán meter un conductor con corriente con posibilidad de moverse, en lugar del imán movible.
De esta forma es como se construyen los motores eléctricos de corriente continua.
¿Qué sucede?
Que se moverá el conductor en lugar del imán.
Pero...¿Cómo será su movimiento?
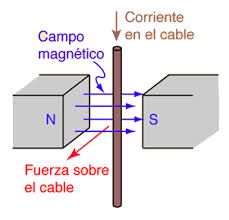
La fuerza creada por los campos del imán y del conductor lo moverá perpendicular al campo creado por el imán fijo (arriba o abajo).
Una corriente + campo magnético = movimiento.
La dirección de la corriente sobre el conductor hará que este suba o baje.
Recuerda dos imanen enfrentados = fuerza de atracción o repulsión.
Según el sentido de la corriente por el conductor, que entre o salga, la fuerza de los campos hará que se mueva hacia arriba o hacia abajo el conductor.
Si el campo magnético es horizontal y el conductor está vertical, el conductor se desplazará saliendo o entrando del imán, en lugar de subir o bajar.
La pregunta es...
¿Cómo puedo saber cómo se moverá el conductor dentro del campo magnético del imán fijo?
Es muy fácil averiguarlo con la regla de la mano izquierda.
Regla de la Mano Izquierda
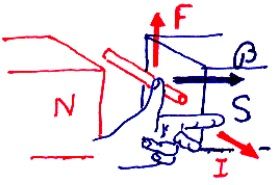
Colocamos la mano izquierda con el dedo índice en dirección del campo magnético creado por el imán (de Norte a Sur). Dirección del campo magnético B
Los otros 3 dedos, menos el pulgar, en la dirección de la corriente eléctrica (I) por el conductor (ver en la imagen siguiente).
La posición del pulgar nos dice la dirección del movimiento del conductor (en la imagen F, hacia arriba).
F = Fuerza que mueve el conductor.
Fíjate en la imagen siguiente:
El funcionamiento de estos motores es por inducción electromagnética, por eso también se llaman motores de inducción.
Inducción Electromagnética = una corriente, induce (crea) un campo magnético que a su vez crea un movimiento.
Ahora es como si tenemos 2 conductores, uno por cada parte de la espira y cada uno estará a un lado diferente enfrentado con el imán del estator.
Si ahora meto corriente por un lado de la espira (I), resulta que por un lado (conductor) de la espira entra la corriente y por el otro (conductor) saldrá.
En la imagen por la derecha entra y por el lado izquierdo la corriente sale.
Tenemos 2 conductores con corrientes contrarias.
¿Qué pasará?
Pues según lo visto hasta ahora, un lado de la espira tendrá una fuerza hacia arriba, subirá y el otro una fuerza hacia abajo, por lo que bajará.
Se produce par de fuerzas con sentido contrario, lo que hace que la espira gire.
Puede comprobarlo por la regla de mano izquierda.
Par de Fuerzas = Giro
Hemos conseguido hacer girar una espira por medio de la corriente eléctrica.
¡¡¡Ya tenemos nuestro motor!!!.
Hemos convertido la energía eléctrica en energía mecánica en el movimiento del eje.
Para que la entrada y salida de la corriente sea siempre por el mismo lado, aunque la espira gire, necesitamos colocar lo que se llama el colector de delgas.
El colector de delgas es un anillo cortado por el medio que es el encargado hacer que la corriente siempre entre y salga por el mismo lado.
La entrada y salida de la corriente se realiza por las escobillas, unidas al colector de delgas.
Si te fijas en la imagen anterior, el colector de delgas esta partido en dos y gira con la espira, por eso al girar posibilita que siempre entre la corriente por el mismos sitio respecto a la espira.
En el caso de la figura la corriente siempre entra por la parte de la espira que está a la izquierda (frente el polo sur del imán fijo) y siempre sale por la parte que está a la derecha (frente al polo Norte del imán fijo) independientemente de la posición de la espira.
El par de fuerzas sobre la espira siempre hace que gire hacia el mismo lado.
Si cambio el sentido de la corriente la espira girará en sentido contrario, por eso los motores de cc simplemente con cambiar la polaridad cambia su sentido de giro.
Este sería el motor más sencillo, pero lógicamente para que tenga más par (fuerza) lo que haremos será colocar muchas espiras formando una bobina o también llamado devanado.
Además podemos conseguir un campo estático mayor si sobre el imán fijo enrollamos unas bobina de cable eléctrico y hacemos pasar por la bobina una corriente eléctrica
Lo que creamos en el estator es un electroimán que es capaz de generar un campo magnético mayor en la parte fija y por lo tanto mayor par se produce sobre la espira o bobinado del eje giratorio.
Otra forma de explicarlo es por medio de los polos magnéticos creados.
En el rotor (parte en movimiento) se crean dos polaridades diferentes, por ejemplo Norte a un lado y Sur al otro (colores azul y rojo en la imagen).
Siempre serán las mismas, porque la corriente siempre entra y sale por el mismo lado, gracias al colector de delgas.
de esta forma siempre los polos fijo del estator están enfrentados a los polos móviles del rotor y como son de la misma polaridad se produce el giro
Recuerda: Polos igual = Fuerza de repulsión.
La fuerza con la que el motor gira (el par motor) es proporcional a la corriente que hay por los conductores. A mayor tensión, mayor corriente y mayor par motor.

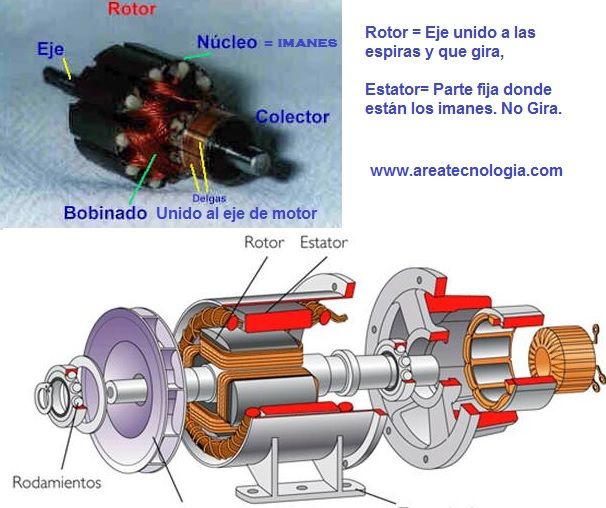
- Estator: Parte fija, que no se mueve. Normalmente está formado por unos imanes con bobinas enrolladas sobre ellos.
- Rotor: Parte móvil que gira dentro del estator. Suele ser un eje con chapas magnéticas o bobinas.
Además tenemos:
- Entrehierro: Espacio de aire que separa el estator del rotor y que permite que pueda existir movimiento. Debe ser lo más reducido posible.
- Escobillas para poder meter la corriente eléctrica en el rotor del moto
- Delgas para que siempre entre y salga en la misma dirección la corriente por las espiras.
los motores cc más grandes, tienen los imanes del estator bobinados para crear un electroimán y crear campos magnéticos mayores.
Hay un tipo de motor de cc que no lleva bobinas en el estator, son los llamados "motores de imanes permanentes", motores usados en juguetes y pequeños aparatos.
Otras partes son:
- La culata es la parte del estator que forma parte del circuito magnético y que soporta los polos.
- Rodeando a la culata está la carcasa de hierro de fundición y que es la envolvente de la máquina.
- Sobre la culata se fijan los polos principales o polos inductores donde se arrolla el devanado inductor, también denominado de excitación o de campo.
- Cada polo consta de un núcleo polar donde, se arrolla el bobinado del polo, y de una expansión denominada zapata polar.
- Los polos auxiliares o de conmutación tienen como función mejorar la conmutación en el colector de delgas y, a veces, también compensar la reacción de inducido. Se disponen entre los polos principales y se conectan en serie con el inducido.
- El rotor tiene un devanado cerrado y un colector de delgas que permite conectarlo a un circuito eléctrico exterior a través de unas escobillas situadas en el estator. Este devanado es el inducido.

Par Motor en los Motores de CC
- Par de arranque (M): El par necesario para que el motor inicie su giro desde el reposo. Debe ser suficiente para vencer los rozamientos y la inercia.
- Par de aceleración: Actúa sobre el motor desde el instante del arranque hasta que alcanza la velocidad nominal.
- Par nominal: Actúa sobre el motor una vez que ha alcanzado su velocidad normal o de régimen.
- Par Resistente (Mr): Resistencia que ofrece la carga.
En el arranque, el par desarrollado (M o par motor) debe vencer la resistencia que oponga la carga o par resistente (Mr).
Debe cumplirse que M > Mr.
En el instante del arranque, la velocidad del motor es 0 y por tanto también la fuerza contraelectromotriz es nula.
El motor alcanza su régimen estable cuando su velocidad se mantiene constante, en ese instante el par motor y par resistente son iguales (M = Mr) y el motor absorbe de la red la intensidad nominal.
En el arranque, la intensidad que absorbe el motor de la red puede ser hasta 6 veces la intensidad en régimen estable o intensidad nominal.
Luego veremos las curvas del par motor junto con la velocidad y la intensidad en cada tipo de motor distinto.
Intensidades de Arranque
Cuando conectamos el motor el motor parte de la situación de paro total.
Esto hace que para que empiece a girar necesite una fuerza mucho mayor que cuando está girando.
Esta fuerza mayor en el arranque la consigue aumentando mucho la intensidad que absorbe.
Esta sobreintensidad puede afectar no solo al motor, sino incluso a la línea que lo alimenta.
Las diferentes legislaciones, por ejemplo el Reglamento de Baja Tensión, establece unos límites en estas corrientes o intensidades de arranque.
Los motores de más de 0,75Kw (Kilovatios) de potencia deben de estar dispuesto con una resistencia o reóstato de arranque que limite la intensidad de arranque con respecto a la de marcha normal del motor, que corresponde con la de plena carga.
Estas resistencias se suelen colocar en serie con el inducido, hasta que la corriente se limite a la tabla siguiente.
A continuación vemos estas limitaciones en la siguiente tabla:

Según el motor va aumentando su velocidad, se van quitando resistencias o disminuyendo su valor, hasta que se quitan por completo a plena carga.

Los motores de cc utilizados en la industria llevan bobinados los polos o imanes del estator y también lleva bobinado el rotor.
Devanado = Bobinado o Bobinas
La forma de conexión para alimentar ambos devanados, bobina inductora e inducida, es precisamente la forma de clasificar los tipos de motores de corriente continua.
Bobina Inductora: Bobina que tiene el campo magnético. La bobina o electroimán del estator.
Bobina Inducida: Bobina que recibe la acción del campo magnético fijo. Bobina del rotor.
Veamos los tipos, sus características y curvas, para al final ver cómo se conectan.
Motor de Excitación Independiente
El motor de excitación independiente es tal que el inductor y el inducido se alimentan de dos fuentes de energía independientes.
No se suelen utilizar, salvo excepciones muy concretas, por el inconveniente de tener que utilizar 2 fuentes de alimentación externas independientes.
De todas formas, las características de funcionamiento son similares a las del motor con excitación en derivación o shunt, por lo que no las estudiaremos.

Motor en Serie
El motor serie es aquel en el que los devanados del inductor y del inducido se encuentran conectados en serie.

Solo necesitan 1 fuente de alimentación en cc.
En cualquier motor cc lo más importante es el comportamiento del motor según su velocidad y su par.
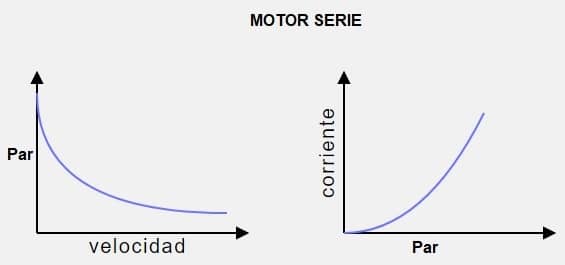
Tiene un elevado Par de arranque.
Si disminuye la carga del motor (par), disminuye la intensidad de corriente absorbida y el motor aumenta su velocidad.
Esto puede ser peligroso.
En vacío el motor es inestable, pues la velocidad aumenta bruscamente, o lo que es lo mismo en vacío se embala.
Esto hace que su uso sea siempre en casos en los que el arranque sea con carga.
Por esto, se utiliza en vehículos de tracción eléctrica, como tranvías, locomotoras, trolebuses, en el sector de la automoción, en polipastos, elevadores y grúas porque ofrece un elevado par de arranque.
Motor en Derivación o Shunt
El motor Shunt se conectan los devanados inductor e inducido en paralelo.

Nota: Al Par motor se le puede llamar Momento o incluso Torque.

La velocidad permanece prácticamente constante para cualquier régimen de carga.
El par se puede aumentar aumentando la corriente del motor sin que disminuya la velocidad.
Se emplea en casos donde se necesite una velocidad constante y no sea necesario arrancar el motor a plena carga (con mucho par).
Dada la estabilidad que permite el motor derivación, posee un campo de aplicación bastante amplio, como, por ejemplo, en máquinas, herramientas para metales como el torno, madera, plásticos, aspiradoras, sistemas de transporte y rectificadoras, etc.
Los motores en paralelo se utilizan cada vez menos, sus tareas las asumen los motores de CA, pero todavía se encuentran en algunos ascensores.
Motor Compound
El motor Compound o Compuesto consta de dos devanados inductores, uno está en serie con el devanado inducido y el otro en paralelo.

En el arranque se comportan en vacío como los motores en paralelo.
Este tipo de motor tiene un par de arranque alto cuando la carga varía ligeramente.
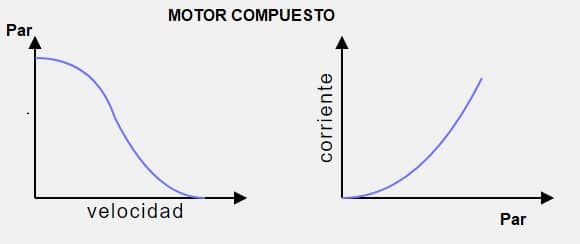
Los motores con excitación compuesta el devanado en derivación impide el llamado embalamiento de los motores serie, cuando el motor trabaja en vacío.
Cuando el motor tiene carga, el devanado en serie hace que el flujo magnético aumente con lo que la velocidad disminuye y el par aumenta, aunque no tanto como en un motor serie.
Conclusión: Buen par de arranque y velocidad mas o menos constante.
Se utilizan en aquellos casos en los que el par de arranque de los motores en paralelo no es capaz de mover la carga en los primeros momentos, como, por ejemplo, en dispositivos de elevación.
Se puede utilizar prácticamente para cualquier cosa como tracción, laminadoras, máquinas herramientas, etc.
Curvas Par-Velocidad-Intensidad
Veamos las curvas de los motores de corriente continua en función de tipo de conexión pero combinadas para apreciar mejor las diferencias.
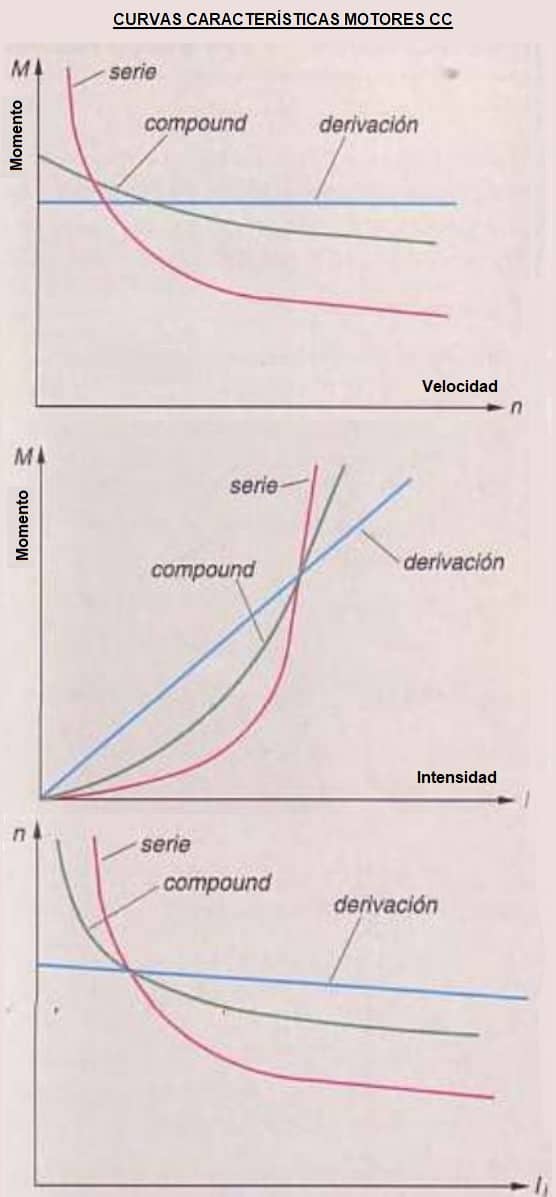
Curva Momento-Velocidad
El mayor momento durante el arranque se obtiene en el motor serie, le sigue el motor compound y por último el motor en derivación.
Curva Momento-Intensidad
El consumo de intensidad aumenta proporcional al par en el motor derivación.
Curva Velocidad-Intensidad
La velocidad más constante se obtiene en el motor en derivación, le sigue el motor compound y por último el motor en serie.
Otros Motores de CC
Motores Sin Escobillas
Hay unos motores de corriente continua llamados "Motores sin Escobillas" o de "Imanes Permanentes" o "Brushless" o incluso "De Conmutación Electrónica".
Este tipo de motores funcionan sin necesidad de escobillas que tienden al desgaste.
Las escobillas son reemplazadas por un dispositivo electrónico que mejora la fiabilidad y la durabilidad de la unidad.
Por ejemplo, se necesita un microcontrolador que utiliza una entrada de sensores que indican la posición del rotor, para energizar las bobinas del estator en el momento correcto.
Visualmente son iguales al resto de motores de corriente continua.
Precisamente la desventaja de los motores sin escobillas es que necesitan administración electrónica para funcionar.
Los motores de este tipo se utilizan en áreas donde se requiere un control preciso y un par bajo, como en robots y servo sistemas.
Los motores paso a paso son un ejemplo del diseño sin escobillas, como los que vamos a ver a continuación.
Motor Paso a Paso
Básicamente consiste en un motor que tiene como mínimo cuatro bobinas que al ser energizadas con corriente continua de acuerdo a una secuencia, origina el avance del eje de acuerdo a ángulos exactos (submúltiplos de 360).
Estos motores son muy utilizados en impresoras, en disqueteras, el sistema de control de posición accionado digitalmente.
Motor Universal
Tiene la forma de un motor de corriente continua en conexión serie.
La principal diferencia es que es diseñado para funcionar con corriente alterna y con corriente continua.
Se utiliza en los taladros, aspiradoras, licuadoras, lustradoras, etc. su eficiencia es baja (de orden del 51%), pero como se utilizan en maquinas de pequeña potencia esta ineficiencia no se considera importante.
El Servomotor
Es muy parecido al de paso a paso. Para saber más sobre este tipo de motor te recomiendo: Servomotores.
Bornes de las Máquinas de CC

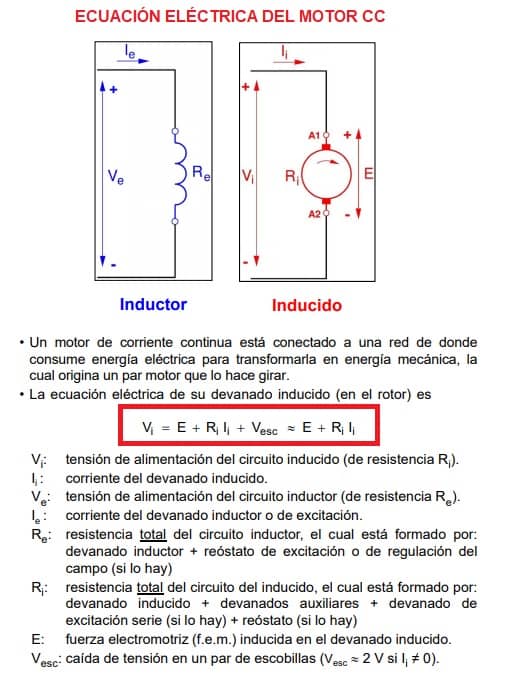
Ecuación General de los Motores CC
Potencias en los Motores CC
En un motor la potencia de entrada P1 es la potencia que la red eléctrica (o las dos redes eléctricas que alimentan, respectivamente, al inductor y al inducido del motor cuando la excitación es independiente) le suministra y la potencia de salida P2 es la potencia mecánica que el motor ejerce sobre el eje.
También se suele llamar a P1 potencia absorbida y a la P2 la potencia útil
P1 = Vi x Ii + Ve x Ie
Vi x Ii = Pi = Potencia en el inducido
Vi = Tensión en el inducido
Ii = Intensidad en el inducido
Ve = tensión de alimentación del circuito inductor
Ie : corriente del devanado inductor o de excitación
Si la excitación no es independiente:
P1 = Pabsorbida = V x Itotal
El rendimiento del motor será:
η = P2 / P1 = Pútil/ Pabsorbida
Con lo que si sabemos el rendimiento de un motor podemos averiguar la potencia de salida, mecánica o útil (P2)
P2 = Pútil = η x Pabsorbida
Pérdidas Motor de CC
Esta potencia útil es el resultado de restar a la potencia absorbida todas las potencias perdidas, que son:
- Pérdidas en los conductores de la excitación por efecto de su resistencia eléctrica.
- Pérdidas en los conductores por su resistencia eléctrica del inducido y del inductor, denominadas, pérdidas en el cobre (Pcu)
Pcu-inducido = Ve x Ie = Ri x Ii2
Pcu-inductor = Ve x Ie = Re x Ie2
Cada una de ellas se puede evaluar mediante la expresión: P=I²·R, pues es potencia que se pierde en forma de calor.
- Pérdidas en el hierro, por la energía perdida en los campos magnéticos y en las corrientes parásitas que aparecen en las piezas de hierro (PFe)
- Pérdidas mecánicas por rozamientos y ventilación (PMec)
Para obtener los valores de las pérdidas en el hierro y mecánicas se suelen hacer ensayos de funcionamiento del motor en vacío.

Ensayo en Vacío
Esta es la corriente que consume el motor sin carga, alimentado a su tensión nominal.
Se pone el motor a funcionar sin arrastrar nada, con lo cual la potencia que consume el inducido es despreciable, y la potencia absorbida se gasta únicamente en las pérdidas en el cobre (que se pueden calcular), y en las pérdidas en el hierro más las mecánicas, obteniendo así el valor de estas dos últimas en conjunto.
Este valor se mantiene con el motor funcionando bajo carga.
Ensayo en Carga
Con este ensayo se pretende valorar el comportamiento del motor con diferentes tipos de cargas.
Gracias a este ensayo podemos obtener las gráficas de magnitudes tan importantes como el par, la intensidad absorbida o la velocidad del motor para diferentes cargas.
Frenado de los Motores de CC
- El frenado a contracorriente consiste en la inversión del sentido de giro en marcha explicada antes.
El motor empieza a reducir su velocidad y cuando esta se anula se desconecta de la red para evitar que empiece a girar en sentido inverso.
- El frenado reóstatico o dinámico consiste en desconectar el inducido del motor de la red y conectarlo a una resistencia (suele ser el reóstato de arranque).
La máquina empieza a actuar como generador, ejerciendo un par de frenado y disipando en la resistencia la energía eléctrica generada.
Mediante esta resistencia se controla el par de frenado.
- El frenado con recuperación o regenerativo consiste también en hacer que la máquina pase a funcionar como generador.
En este caso la energía eléctrica generada no se pierde, sino que se devuelve a la red eléctrica del inducido.
Esto se consigue ajustando la tensión Vi para que en cada momento se mantenga inferior a la f.e.m. E.
Mediante la tensión del inducido Vi se controla el par de frenado.
¿Te ha gustado la web Motores Eléctricos de Corriente Continua? Pulsa en Compartir. Gracias
© Se permite la total o parcial reproducción del contenido, siempre y cuando se reconozca y se enlace a este artículo como la fuente de información utilizada.
Son motores cada vez más usados en la industria debido a que son muy fáciles de regular su velocidad y que simplemente con cambiar su polaridad cambia su sentido de giro.
Además de estas 2 ventajas también son muy fáciles de controlar su posición, incluyendo la puesta en marcha y el paro total (frenado).
En esta página vamos a estudiar en profundidad cómo son estos motores eléctricos, cómo funcionan y los tipos que hay.
Si te interesan los motores de corriente alterna visita: Motores de Corriente Alterna
¡¡¡SI QUIERES APRENDER FÁCILMENTE LAS MÁQUINAS ELÉCTRICAS TE RECOMENDAMOS ESTE FANTÁSTICO LIBRO!!!:
Libro Maquinas Eléctricas
Índice de Contenidos:
- ¿Qué es un Motor de CC?
- El Electromagnetismo
- Regla de la Mano Izquierda
- ¿Cómo Funciona un Motor de CC?
- Partes de un Motor de Corriente Continua
- El Par Motor
- Intensidades en el Arranque
- Tipos de Motores de Corriente Continua:
- Excitación Independiente
- Motor CC Serie
- Motor CC Derivación
- Motor CC Compound
- Curvas Par-Velocidad-Intensidad
- Otros Motores CC:
- Sin Escobillas
- Paso a Paso
- Universal
- Servomotor
- Los Bornes en los Motores CC
- Potencias en los Motores CC
- Pérdidas Motores CC
- Ensayo en Vacío
- Ensayo en Carga
- Frenado de los Motores CC
- Esquema Inversión de Giro Motor CC
¿Qué es un Motor de CC?
El término "motor de CC" se utiliza para hacer referencia a cualquier máquina eléctrica rotativa que convierte la energía eléctrica de corriente continua en energía mecánica.La energía eléctrica que consumen o fuente de alimentación, obviamente es corriente continua, por ejemplo pilas y/o las baterías.
El Electromagnetismo
Antes de entrar de lleno en el funcionamiento debemos comprender algunos conceptos de electromagnetismo.Todo empezó gracias al científico Hans Christian Oersted que comprobó como colocando un cable alrededor o cerca de una brújula, si hacia pasar una corriente por el cable, la aguja de la brújula, que está unida a un imán giratorio, se movía.
Lo que hacía el cable, al que le atravesada una corriente eléctrica, era mover el imán de la brújula que estaba dentro de la espira.
De esta forma demostró la relación que había entre la electricidad y el magnetismo.
Descubrió el electromagnetismo.
Recordamos que un campo magnético es una región del espacio donde existen fuerzas magnéticas (fuerzas que atraen o repelen metales).
Esta propiedad de atraer metales se llama magnetismo.
Un campo magnético lo puede generar un imán con dos polos, polo Norte (N) y polo sur (S).
Los polos se encuentran en los extremos del campo generado por el imán.
Antes del descubrimiento de Oersted, ya se sabía que un imán tiene un campo magnético y que cuando le atraviesa (se junta) otro campo magnético, el de otro imán por ejemplo, los imanes se mueve por atracción o repulsión (se atraen o repelen).
Conclusión: si acercas dos imanes, cuando se juntan los campos magnéticos generados por cada uno de ellas, se mueven.
Imanes con polos iguales enfrentados se repelen, polos distintos se atraen.
Pero... ¿Qué demostró Oersted con su experimento?.
Pues algo importantísimo para poder posteriormente crear un motor eléctrico.
Oersted con su experimento dedujo que lo que pasaba era que se creaba un campo magnético alrededor del cable al hacer pasar por él una corriente eléctrica.
¡¡¡Por eso se movía la brújula al pasar corriente por el conductor, porque había 2 campos magnéticos enfrentados!!!
No solo podemos crear un campo magnético con un imán, ahora según el descubrimiento de Oersted, podemos generar un campo magnético por medio de electricidad.
Imán ==> Campo Magnético
Electricidad ==> Campo Magnético
Las dos fuerzas magnéticas, una creada por la corriente por el conductor y la otra por la del propio campo magnético del imán, interactúan haciendo que la aguja de la brújula, que está fija a un imán, girase.
En definitiva había creado un pequeño motor eléctrico.
Metía corriente por el cable y hacía girar un eje, el de la brújula.
Electricidad ==> Campo Magnético ==> Rotación Mecánica
Podemos dejar fijo (estático) el imán y dentro del campo del imán meter un conductor con corriente con posibilidad de moverse, en lugar del imán movible.
De esta forma es como se construyen los motores eléctricos de corriente continua.
¿Qué sucede?
Que se moverá el conductor en lugar del imán.
Pero...¿Cómo será su movimiento?
La fuerza creada por los campos del imán y del conductor lo moverá perpendicular al campo creado por el imán fijo (arriba o abajo).
Una corriente + campo magnético = movimiento.
La dirección de la corriente sobre el conductor hará que este suba o baje.
Recuerda dos imanen enfrentados = fuerza de atracción o repulsión.
Según el sentido de la corriente por el conductor, que entre o salga, la fuerza de los campos hará que se mueva hacia arriba o hacia abajo el conductor.
Si el campo magnético es horizontal y el conductor está vertical, el conductor se desplazará saliendo o entrando del imán, en lugar de subir o bajar.
La pregunta es...
¿Cómo puedo saber cómo se moverá el conductor dentro del campo magnético del imán fijo?
Es muy fácil averiguarlo con la regla de la mano izquierda.
Regla de la Mano Izquierda
Colocamos la mano izquierda con el dedo índice en dirección del campo magnético creado por el imán (de Norte a Sur). Dirección del campo magnético B
Los otros 3 dedos, menos el pulgar, en la dirección de la corriente eléctrica (I) por el conductor (ver en la imagen siguiente).
La posición del pulgar nos dice la dirección del movimiento del conductor (en la imagen F, hacia arriba).
F = Fuerza que mueve el conductor.
Fíjate en la imagen siguiente:
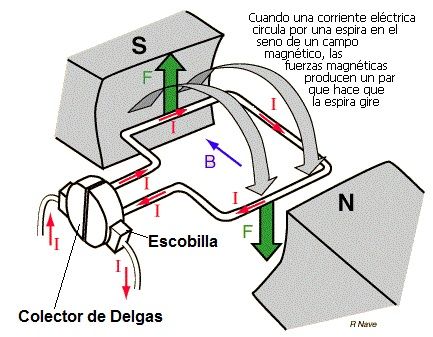
El funcionamiento de estos motores es por inducción electromagnética, por eso también se llaman motores de inducción.
Inducción Electromagnética = una corriente, induce (crea) un campo magnético que a su vez crea un movimiento.
¿Cómo Funciona un Motor de CC?
Para crear nuestro primer motor de corriente continua, el cable con corriente eléctrica que anteriormente se movía dentro de un campo, lo vamos a convertir en una espira (cable enrollado).Ahora es como si tenemos 2 conductores, uno por cada parte de la espira y cada uno estará a un lado diferente enfrentado con el imán del estator.
Si ahora meto corriente por un lado de la espira (I), resulta que por un lado (conductor) de la espira entra la corriente y por el otro (conductor) saldrá.
En la imagen por la derecha entra y por el lado izquierdo la corriente sale.
Tenemos 2 conductores con corrientes contrarias.
¿Qué pasará?
Pues según lo visto hasta ahora, un lado de la espira tendrá una fuerza hacia arriba, subirá y el otro una fuerza hacia abajo, por lo que bajará.
Se produce par de fuerzas con sentido contrario, lo que hace que la espira gire.
Puede comprobarlo por la regla de mano izquierda.
Par de Fuerzas = Giro
Hemos conseguido hacer girar una espira por medio de la corriente eléctrica.
¡¡¡Ya tenemos nuestro motor!!!.
Hemos convertido la energía eléctrica en energía mecánica en el movimiento del eje.
Para que la entrada y salida de la corriente sea siempre por el mismo lado, aunque la espira gire, necesitamos colocar lo que se llama el colector de delgas.
El colector de delgas es un anillo cortado por el medio que es el encargado hacer que la corriente siempre entre y salga por el mismo lado.
La entrada y salida de la corriente se realiza por las escobillas, unidas al colector de delgas.
Si te fijas en la imagen anterior, el colector de delgas esta partido en dos y gira con la espira, por eso al girar posibilita que siempre entre la corriente por el mismos sitio respecto a la espira.
En el caso de la figura la corriente siempre entra por la parte de la espira que está a la izquierda (frente el polo sur del imán fijo) y siempre sale por la parte que está a la derecha (frente al polo Norte del imán fijo) independientemente de la posición de la espira.
El par de fuerzas sobre la espira siempre hace que gire hacia el mismo lado.
Si cambio el sentido de la corriente la espira girará en sentido contrario, por eso los motores de cc simplemente con cambiar la polaridad cambia su sentido de giro.
Este sería el motor más sencillo, pero lógicamente para que tenga más par (fuerza) lo que haremos será colocar muchas espiras formando una bobina o también llamado devanado.
Además podemos conseguir un campo estático mayor si sobre el imán fijo enrollamos unas bobina de cable eléctrico y hacemos pasar por la bobina una corriente eléctrica
Lo que creamos en el estator es un electroimán que es capaz de generar un campo magnético mayor en la parte fija y por lo tanto mayor par se produce sobre la espira o bobinado del eje giratorio.
Otra forma de explicarlo es por medio de los polos magnéticos creados.
En el rotor (parte en movimiento) se crean dos polaridades diferentes, por ejemplo Norte a un lado y Sur al otro (colores azul y rojo en la imagen).
Siempre serán las mismas, porque la corriente siempre entra y sale por el mismo lado, gracias al colector de delgas.
de esta forma siempre los polos fijo del estator están enfrentados a los polos móviles del rotor y como son de la misma polaridad se produce el giro
Recuerda: Polos igual = Fuerza de repulsión.
La fuerza con la que el motor gira (el par motor) es proporcional a la corriente que hay por los conductores. A mayor tensión, mayor corriente y mayor par motor.
Partes de un Motor de Corriente Continua
Según lo explicado tenemos dos partes principales en nuestro motor:- Estator: Parte fija, que no se mueve. Normalmente está formado por unos imanes con bobinas enrolladas sobre ellos.
- Rotor: Parte móvil que gira dentro del estator. Suele ser un eje con chapas magnéticas o bobinas.
Además tenemos:
- Entrehierro: Espacio de aire que separa el estator del rotor y que permite que pueda existir movimiento. Debe ser lo más reducido posible.
- Escobillas para poder meter la corriente eléctrica en el rotor del moto
- Delgas para que siempre entre y salga en la misma dirección la corriente por las espiras.
los motores cc más grandes, tienen los imanes del estator bobinados para crear un electroimán y crear campos magnéticos mayores.
Hay un tipo de motor de cc que no lleva bobinas en el estator, son los llamados "motores de imanes permanentes", motores usados en juguetes y pequeños aparatos.
Otras partes son:
- La culata es la parte del estator que forma parte del circuito magnético y que soporta los polos.
- Rodeando a la culata está la carcasa de hierro de fundición y que es la envolvente de la máquina.
- Sobre la culata se fijan los polos principales o polos inductores donde se arrolla el devanado inductor, también denominado de excitación o de campo.
- Cada polo consta de un núcleo polar donde, se arrolla el bobinado del polo, y de una expansión denominada zapata polar.
- Los polos auxiliares o de conmutación tienen como función mejorar la conmutación en el colector de delgas y, a veces, también compensar la reacción de inducido. Se disponen entre los polos principales y se conectan en serie con el inducido.
- El rotor tiene un devanado cerrado y un colector de delgas que permite conectarlo a un circuito eléctrico exterior a través de unas escobillas situadas en el estator. Este devanado es el inducido.
Par Motor en los Motores de CC
- Par de arranque (M): El par necesario para que el motor inicie su giro desde el reposo. Debe ser suficiente para vencer los rozamientos y la inercia.
- Par de aceleración: Actúa sobre el motor desde el instante del arranque hasta que alcanza la velocidad nominal.
- Par nominal: Actúa sobre el motor una vez que ha alcanzado su velocidad normal o de régimen.
- Par Resistente (Mr): Resistencia que ofrece la carga.
En el arranque, el par desarrollado (M o par motor) debe vencer la resistencia que oponga la carga o par resistente (Mr).
Debe cumplirse que M > Mr.
En el instante del arranque, la velocidad del motor es 0 y por tanto también la fuerza contraelectromotriz es nula.
El motor alcanza su régimen estable cuando su velocidad se mantiene constante, en ese instante el par motor y par resistente son iguales (M = Mr) y el motor absorbe de la red la intensidad nominal.
En el arranque, la intensidad que absorbe el motor de la red puede ser hasta 6 veces la intensidad en régimen estable o intensidad nominal.
Luego veremos las curvas del par motor junto con la velocidad y la intensidad en cada tipo de motor distinto.
Intensidades de Arranque
Cuando conectamos el motor el motor parte de la situación de paro total.
Esto hace que para que empiece a girar necesite una fuerza mucho mayor que cuando está girando.
Esta fuerza mayor en el arranque la consigue aumentando mucho la intensidad que absorbe.
Esta sobreintensidad puede afectar no solo al motor, sino incluso a la línea que lo alimenta.
Las diferentes legislaciones, por ejemplo el Reglamento de Baja Tensión, establece unos límites en estas corrientes o intensidades de arranque.
Los motores de más de 0,75Kw (Kilovatios) de potencia deben de estar dispuesto con una resistencia o reóstato de arranque que limite la intensidad de arranque con respecto a la de marcha normal del motor, que corresponde con la de plena carga.
Estas resistencias se suelen colocar en serie con el inducido, hasta que la corriente se limite a la tabla siguiente.
A continuación vemos estas limitaciones en la siguiente tabla:
Según el motor va aumentando su velocidad, se van quitando resistencias o disminuyendo su valor, hasta que se quitan por completo a plena carga.
Tipos de Motores de Corriente Continua
Veamos primero un esquema de los tipos y luego estudiaremos uno a uno.Los motores de cc utilizados en la industria llevan bobinados los polos o imanes del estator y también lleva bobinado el rotor.
Devanado = Bobinado o Bobinas
La forma de conexión para alimentar ambos devanados, bobina inductora e inducida, es precisamente la forma de clasificar los tipos de motores de corriente continua.
Bobina Inductora: Bobina que tiene el campo magnético. La bobina o electroimán del estator.
Bobina Inducida: Bobina que recibe la acción del campo magnético fijo. Bobina del rotor.
Veamos los tipos, sus características y curvas, para al final ver cómo se conectan.
Motor de Excitación Independiente
El motor de excitación independiente es tal que el inductor y el inducido se alimentan de dos fuentes de energía independientes.
No se suelen utilizar, salvo excepciones muy concretas, por el inconveniente de tener que utilizar 2 fuentes de alimentación externas independientes.
De todas formas, las características de funcionamiento son similares a las del motor con excitación en derivación o shunt, por lo que no las estudiaremos.
Motor en Serie
El motor serie es aquel en el que los devanados del inductor y del inducido se encuentran conectados en serie.
Solo necesitan 1 fuente de alimentación en cc.
En cualquier motor cc lo más importante es el comportamiento del motor según su velocidad y su par.
Tiene un elevado Par de arranque.
Si disminuye la carga del motor (par), disminuye la intensidad de corriente absorbida y el motor aumenta su velocidad.
Esto puede ser peligroso.
En vacío el motor es inestable, pues la velocidad aumenta bruscamente, o lo que es lo mismo en vacío se embala.
Esto hace que su uso sea siempre en casos en los que el arranque sea con carga.
Por esto, se utiliza en vehículos de tracción eléctrica, como tranvías, locomotoras, trolebuses, en el sector de la automoción, en polipastos, elevadores y grúas porque ofrece un elevado par de arranque.
Motor en Derivación o Shunt
El motor Shunt se conectan los devanados inductor e inducido en paralelo.
Nota: Al Par motor se le puede llamar Momento o incluso Torque.
La velocidad permanece prácticamente constante para cualquier régimen de carga.
El par se puede aumentar aumentando la corriente del motor sin que disminuya la velocidad.
Se emplea en casos donde se necesite una velocidad constante y no sea necesario arrancar el motor a plena carga (con mucho par).
Dada la estabilidad que permite el motor derivación, posee un campo de aplicación bastante amplio, como, por ejemplo, en máquinas, herramientas para metales como el torno, madera, plásticos, aspiradoras, sistemas de transporte y rectificadoras, etc.
Los motores en paralelo se utilizan cada vez menos, sus tareas las asumen los motores de CA, pero todavía se encuentran en algunos ascensores.
Motor Compound
El motor Compound o Compuesto consta de dos devanados inductores, uno está en serie con el devanado inducido y el otro en paralelo.
En el arranque se comportan en vacío como los motores en paralelo.
Este tipo de motor tiene un par de arranque alto cuando la carga varía ligeramente.
Los motores con excitación compuesta el devanado en derivación impide el llamado embalamiento de los motores serie, cuando el motor trabaja en vacío.
Cuando el motor tiene carga, el devanado en serie hace que el flujo magnético aumente con lo que la velocidad disminuye y el par aumenta, aunque no tanto como en un motor serie.
Conclusión: Buen par de arranque y velocidad mas o menos constante.
Se utilizan en aquellos casos en los que el par de arranque de los motores en paralelo no es capaz de mover la carga en los primeros momentos, como, por ejemplo, en dispositivos de elevación.
Se puede utilizar prácticamente para cualquier cosa como tracción, laminadoras, máquinas herramientas, etc.
Curvas Par-Velocidad-Intensidad
Veamos las curvas de los motores de corriente continua en función de tipo de conexión pero combinadas para apreciar mejor las diferencias.
Curva Momento-Velocidad
El mayor momento durante el arranque se obtiene en el motor serie, le sigue el motor compound y por último el motor en derivación.
Curva Momento-Intensidad
El consumo de intensidad aumenta proporcional al par en el motor derivación.
Curva Velocidad-Intensidad
La velocidad más constante se obtiene en el motor en derivación, le sigue el motor compound y por último el motor en serie.
Otros Motores de CC
Motores Sin Escobillas
Hay unos motores de corriente continua llamados "Motores sin Escobillas" o de "Imanes Permanentes" o "Brushless" o incluso "De Conmutación Electrónica".
Este tipo de motores funcionan sin necesidad de escobillas que tienden al desgaste.
Las escobillas son reemplazadas por un dispositivo electrónico que mejora la fiabilidad y la durabilidad de la unidad.
Por ejemplo, se necesita un microcontrolador que utiliza una entrada de sensores que indican la posición del rotor, para energizar las bobinas del estator en el momento correcto.
Visualmente son iguales al resto de motores de corriente continua.
Precisamente la desventaja de los motores sin escobillas es que necesitan administración electrónica para funcionar.
Los motores de este tipo se utilizan en áreas donde se requiere un control preciso y un par bajo, como en robots y servo sistemas.
Los motores paso a paso son un ejemplo del diseño sin escobillas, como los que vamos a ver a continuación.
Motor Paso a Paso
Básicamente consiste en un motor que tiene como mínimo cuatro bobinas que al ser energizadas con corriente continua de acuerdo a una secuencia, origina el avance del eje de acuerdo a ángulos exactos (submúltiplos de 360).
Estos motores son muy utilizados en impresoras, en disqueteras, el sistema de control de posición accionado digitalmente.
Motor Universal
Tiene la forma de un motor de corriente continua en conexión serie.
La principal diferencia es que es diseñado para funcionar con corriente alterna y con corriente continua.
Se utiliza en los taladros, aspiradoras, licuadoras, lustradoras, etc. su eficiencia es baja (de orden del 51%), pero como se utilizan en maquinas de pequeña potencia esta ineficiencia no se considera importante.
El Servomotor
Es muy parecido al de paso a paso. Para saber más sobre este tipo de motor te recomiendo: Servomotores.
Bornes de las Máquinas de CC
Ecuación General de los Motores CC
Potencias en los Motores CC
En un motor la potencia de entrada P1 es la potencia que la red eléctrica (o las dos redes eléctricas que alimentan, respectivamente, al inductor y al inducido del motor cuando la excitación es independiente) le suministra y la potencia de salida P2 es la potencia mecánica que el motor ejerce sobre el eje.
También se suele llamar a P1 potencia absorbida y a la P2 la potencia útil
P1 = Vi x Ii + Ve x Ie
Vi x Ii = Pi = Potencia en el inducido
Vi = Tensión en el inducido
Ii = Intensidad en el inducido
Ve = tensión de alimentación del circuito inductor
Ie : corriente del devanado inductor o de excitación
Si la excitación no es independiente:
P1 = Pabsorbida = V x Itotal
El rendimiento del motor será:
η = P2 / P1 = Pútil/ Pabsorbida
Con lo que si sabemos el rendimiento de un motor podemos averiguar la potencia de salida, mecánica o útil (P2)
P2 = Pútil = η x Pabsorbida
Pérdidas Motor de CC
Esta potencia útil es el resultado de restar a la potencia absorbida todas las potencias perdidas, que son:
- Pérdidas en los conductores de la excitación por efecto de su resistencia eléctrica.
- Pérdidas en los conductores por su resistencia eléctrica del inducido y del inductor, denominadas, pérdidas en el cobre (Pcu)
Pcu-inducido = Ve x Ie = Ri x Ii2
Pcu-inductor = Ve x Ie = Re x Ie2
Cada una de ellas se puede evaluar mediante la expresión: P=I²·R, pues es potencia que se pierde en forma de calor.
- Pérdidas en el hierro, por la energía perdida en los campos magnéticos y en las corrientes parásitas que aparecen en las piezas de hierro (PFe)
- Pérdidas mecánicas por rozamientos y ventilación (PMec)
Para obtener los valores de las pérdidas en el hierro y mecánicas se suelen hacer ensayos de funcionamiento del motor en vacío.
Ensayo en Vacío
Esta es la corriente que consume el motor sin carga, alimentado a su tensión nominal.
Se pone el motor a funcionar sin arrastrar nada, con lo cual la potencia que consume el inducido es despreciable, y la potencia absorbida se gasta únicamente en las pérdidas en el cobre (que se pueden calcular), y en las pérdidas en el hierro más las mecánicas, obteniendo así el valor de estas dos últimas en conjunto.
Este valor se mantiene con el motor funcionando bajo carga.
Ensayo en Carga
Con este ensayo se pretende valorar el comportamiento del motor con diferentes tipos de cargas.
Gracias a este ensayo podemos obtener las gráficas de magnitudes tan importantes como el par, la intensidad absorbida o la velocidad del motor para diferentes cargas.
Frenado de los Motores de CC
- El frenado a contracorriente consiste en la inversión del sentido de giro en marcha explicada antes.
El motor empieza a reducir su velocidad y cuando esta se anula se desconecta de la red para evitar que empiece a girar en sentido inverso.
- El frenado reóstatico o dinámico consiste en desconectar el inducido del motor de la red y conectarlo a una resistencia (suele ser el reóstato de arranque).
La máquina empieza a actuar como generador, ejerciendo un par de frenado y disipando en la resistencia la energía eléctrica generada.
Mediante esta resistencia se controla el par de frenado.
- El frenado con recuperación o regenerativo consiste también en hacer que la máquina pase a funcionar como generador.
En este caso la energía eléctrica generada no se pierde, sino que se devuelve a la red eléctrica del inducido.
Esto se consigue ajustando la tensión Vi para que en cada momento se mantenga inferior a la f.e.m. E.
Mediante la tensión del inducido Vi se controla el par de frenado.
Inversión de Giro Esquema
¿Te ha gustado la web Motores Eléctricos de Corriente Continua? Pulsa en Compartir. Gracias
© Se permite la total o parcial reproducción del contenido, siempre y cuando se reconozca y se enlace a este artículo como la fuente de información utilizada.
TAMBIEN TE PUEDE INTERESAR
Maquinas Eléctricas
Motores de Corriente Alterna
El Motor Eléctrico
Tipos de Motores Electricos
Motores Monofasicos
Motor Trifasico
Generadores Electricos
Motores de Gas
Bomba de Calor
Guardamotor
Motor de Combustion Partes
Automatismos
El Motor Homopolar