
ESQUEMAS DE LOS AUTOMATISMOS
Diseñar, Entender e Interpretar los esquemas de los automatismos eléctricos es fundamental para cualquier técnico.
Para lograr esto, se debe conocer e identificar los componentes que forman el circuito, su simbología, su funcionamiento individual y dentro del esquema, así como el funcionamiento global de todo el circuito.
Veremos cómo se representan los automatismos llamados de "Lógica Cableada", que son los que se construyen mediante circuitos con uniones físicas de cables que unen eléctricamente contactores, relés, temporizadores, etc.
Aunque aquí no los estudiaremos, recordar que los Automatismos Programados son aquellos que se realizan utilizando los Autómatas Programables o controladores programables (más conocidos por su nombre inglés: PLC, programmable logic controller).
Si te interesan los esquemas para utilizar con los autómatas o PLCs, puedes empezar por aprender el Lenguaje de Contactos y también tenemos 2 PLCs explicados en los siguientes enlaces:
- Siemens PLC Logo
- Zelio PLC
Pero antes de empezar, déjame recomendarte el mejor libro para aprender los automatismos eléctricos: Libro Automatismos Eléctricos
Índice de Contenidos:
- Objetivo de los Esquemas
- Simbología Eléctrica en Automatismos
- Marcado de Bornes
- Simbología Accionadores Eléctricos
- Esquemas de Mando y Fuerza
- Esquemas Multifilares y Unifilares
- Método de la Cuadricula
- Referencias Cruzadas
- Identificación de Conductores
- Esquemas y Problemas de Automatismos
Objetivos de los Esquemas de Automatismos
Los esquemas de un automatismo eléctrico son representaciones simplificadas de un circuito, independientemente de la clase de esquema, en su realización siempre se deben perseguir los siguientes objetivos:– Expresar de una forma clara el funcionamiento del circuito y de cada uno de sus aparatos.
– Facilitar la localización de cada aparato y sus dispositivos dentro del circuito.
Por regla general, se evitarán los trazos oblicuos de conductores, limitándose a trazos horizontales y verticales.
El trazo oblicuo se limitará a condiciones en las que sea imprescindible para facilitar la comprensión del esquema.
Simbología Eléctrica de Automatismos
Veamos la simbología eléctrica utilizado en los esquemas de los automatismos.Nosotros (y la mayoría) utiliza la simbología de la Norma DIN (UNE en España) y CEI (Comisión Electrotécnica Internacional).
Cualquier componente eléctrico, al hacer su símbolo en el esquema debe tener:

La letra identificativa es diferentes para cada tipo de componente.
Por ejemplo, para los pulsadores e interruptores es la letra S.
Veamos más letras identificativas:
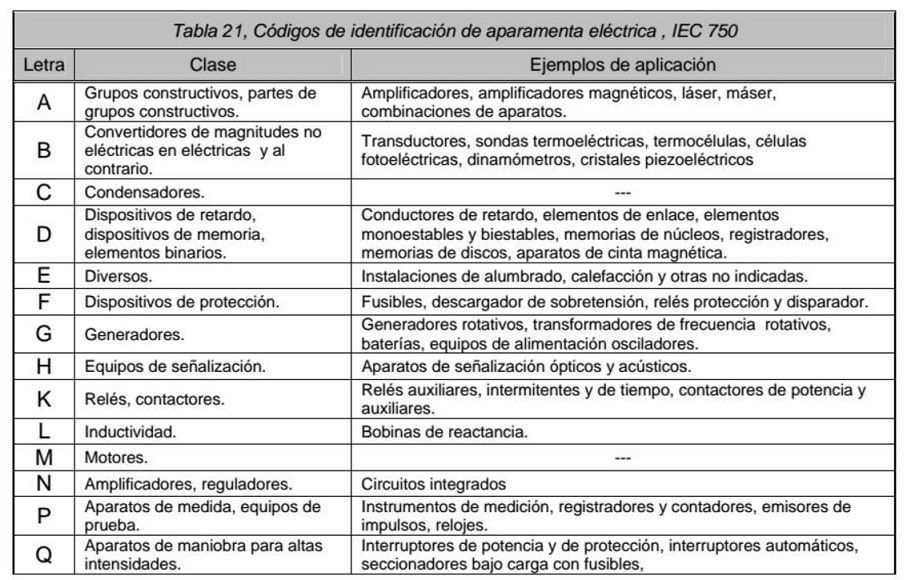
En los automatismos se utilizan con mucha frecuencia las siguientes letras:
- S para pulsadores e interruptores.
- Q para los magnetotérmicos y guardamotores.
- F para elementos de protección en general, por ejemplo los fusibles y relés térmicos.
OJO a veces verás esta letra en los magnetotérmicos y en los guardamotores, ya que es válida para todos los elementos de protección.
- K para los relés y contactores.
- H para las lámparas.
Además los contactores y relés llevan una segunda letra para saber si es un contactor principal o main (M) o si es auxiliar (A).

Los relés temporizados llevan detrás de la letra K la T de temporizado, por ejemplo KT1, KT2...
El número del componente dentro del esquema se pone por orden.
Por ejemplo el S1 es el primer pulsador dentro del esquema, el S2 será el segundo y así sucesivamente.
Marcado de Bornes
Utilizamos el término "bornes" para referirnos a cada una de las partes metálicas de una máquina o dispositivo eléctrico donde se produce la conexión del aparato con los conductores u otros aparatos, es decir, los tornillos de conexión.
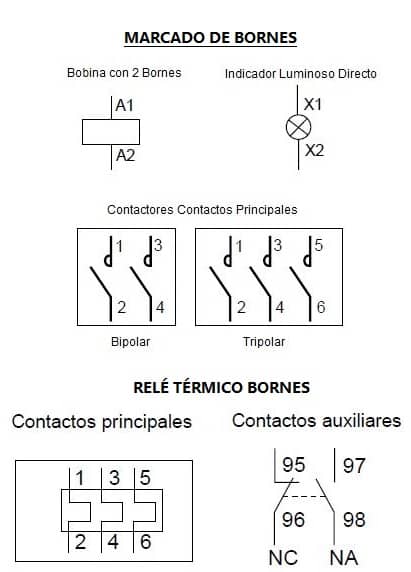
Según la norma los bornes de los aparatos se marcaran con la siguiente numeración:
- Bobinas de relés y contactores conA1 y A2
- Lámparas con X1 y X2
- Contactos Principales del Contactor (los del circuito de fuerza): 1-2, 3-4, 5-6....
- Contactos de los relés térmicos 1-2, 3-4 y 5-6
Nota: los contactos auxiliares del relé térmico llevan una numeración especial que empieza por el número 9.
Los bornes cerrados son el 95-96 los abiertos los 97-98.
Veamos algunos ejemplos:


Los bornes de los contactos auxiliares y de los contactos de los pulsadores e interruptores se marcan con 2 números:
- El primer número indica el orden del contacto dentro del aparato al que pertenece.
- El segundo indica si es abierto o cerrado.
- 1-2 para los normalmente cerrados
- 3-4 para los normalmente abiertos

Por ejemplo, en un contactor el contacto 13-14 será el primer contacto del contactor y será un contacto normalmente abierto.
El contacto 21-22 será el segundo contacto del contactor y será un contacto normalmente cerrado.

Para los relés temporizados el marcado es igual excepto la segunda cifra que será:
- 5-6 para los cerrados
- 7-8 para los abiertos
Por ejemplo, del KT1 (relé temporizador 1) el contacto con bornes 15-16 será un contacto normalmente cerrado y será el primero de todos, y el 25-26 será el segundo de los contactos de KT1 y que también será cerrado.
Podría tener el 37-38, sería el tercer contacto de KT1 y sería normalmente abierto.
Además en el dibujo del símbolo se diferencia si es con retardo a la conexión o trabajo o si es con retardo al reposo a desconexión.
Fíjate en los símbolos:

Recordemos el retardo a la conexión y a la desconexión, muy importante para los automatismos.
- Retrasado a la conexión: También llamado con retardo al trabajo o en inglés "On Delay"
En este tipo de contactos,una vez que le llega corriente a la bobina (se excita) del temporizador, el contacto cambia de posición pasado un tiempo desde que se excita la bobina.
Imaginemos que el tiempo es de 5 segundos y el temporizador es con retardo a la conexión.
Una vez que le llega corriente a la bobina del temporizador, pasados 5 segundos, los contactos abiertos se cierran y los cerrados se abren.
Volverán a su posición original solo cuando deje de llegarle corriente a la bobina (desexcitada).
Fíjate en el siguiente diagrama de tiempos:

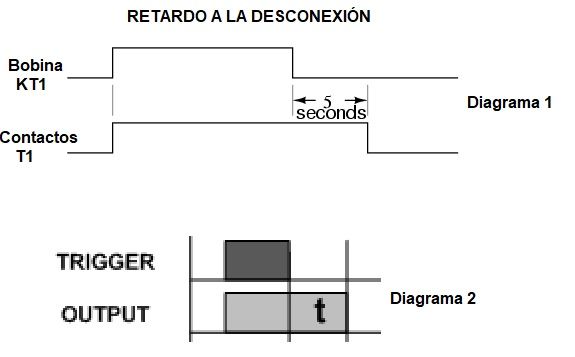
Retrasado a la desconexión: También llamado con retardo al reposo o "Off Delay" en inglés
Cuando le llega corriente a la bobina del temporizador estos contactos cambian de posición, los cerrados se abren y los abiertos se cierran.
Cuando deja de llegarle corriente a la bobina no cambia de posición automáticamente, sino que pasado un tiempo desde que se desconecta la bobina es cuando vuelven a su posición original.
Por ejemplo, si el tiempo es de 5 segundo, cuando la bobina del temporizador se excita los contactos cerrados se abren y los abiertos se cierran.
Si ahora desactivamos la bobina, es decir le deja de llegar corriente, entonces los contactos permanecen en esa posición 5 segundos más.
Pasados esos 5 segundos desde su desactivación, es cuando vuelven a su posición de reposo.
Fíjate en el siguiente diagrama de tiempos:
Veamos algunos ejemplos de todo lo estudiado en el marcado de bornes:
bornas 11 y 12 = 1er contacto normalmente cerrado (función NC)
bornas 23 y 24 = 2º contacto normalmente abierto (función NA)
bornas 35 y 36 = 3er contacto (función temporizada NC)
bornas 47 y 48 = 4º contacto (función temporizada NA)
Para Nombrar o Marcar las Alimentaciones y las Salidas de los Circuitos en los automatismos:
- Alimentación tetrapolar: L1 - L2 - L3 - N - PE (3 fases, neutro y tierra)
- Alimentación tripolar: L1 - L2 - L3 - PE (3 fases y tierra)
- Alimentación monofásica simple: L - N - PE (fase, neutro y tierra)
- Alimentación monofásica compuesta: L1 - L2 - PE (2 fases y tierra)
- Salidas a motores trifásicos: U - V - W - (PE)* ó K - L - M - (PE)*
- Salidas a motores monofásicos: U - V - (PE)* ó K - L - (PE)*
- Salidas a resistencias: A - B - C, etc.
Repasemos ahora los símbolos utilizados para la señalización:

Veamos ahora los símbolos de los finales de carreras y algunos sensores:

Simbología de los Accionadores Eléctricos
Ya sabes que por ejemplo los finales de carrera se pueden accionar de varias formas, y lo mismo ocurre con otros elementos, por eso veamos los símbolos que expresan la forma de accionar los componentes eléctricos.
Esquemas de Mando y de Fuerza
El esquema eléctrico nos representa cómo se relacionan las distintas partes o componentes de un circuito indicando cómo se conexionan entre si y con la red eléctrica.Los esquemas que aquí encontrarás son esquemas funcionales, divididos en 2 esquemas diferentes, el esquema de mando y el de fuerza o potencia.
El esquema de mando: Son los esquemas que representan la parte de control de un automatismo y es una representación de la lógica del automatismo, deben estar representados los siguientes elementos:
– Bobinas de los elementos de mando y protección (contactores, relés, etc.).
– Elementos de diálogo hombre–máquina (pulsadores, finales de carrera, etc.).
– Dispositivos de señalización (pilotos, alarmas, etc.).
– Contactos auxiliares de los aparatos.
Su función principal es la de gobernar y gestionar el comportamiento del propio circuito de fuerza.
El esquema de Potencia o de Fuerza: mediante el cual se suministra energía a los receptores finales a través de las respectivas protecciones (generalmente motores eléctricos).
En este esquema figuran los contactos principales de los siguientes elementos:
– Dispositivos de protección (disyuntores, fusibles, relés, etc.).
– Dispositivos de conexión-desconexión (contactores, interruptores, etc.).
– Actuadores (motores, instalaciones, etc.).
Aquí tienes un ejemplo:
Si el circuito es sencillo se pueden dibujar en la misma hoja el esquema de potencia, a la izquierda, y el de mando a la derecha, cuando esto no sea posible se dibuja primero el de la potencia y después el de mando.
Se utilizarán más hojas numerando el orden sobre el total, así 1/5, 2/5, 3/5... nos indica que el total de hojas son 5 y la cifra primera el orden que ocupa.
Esquemas Unifilares y Multifilares
Por el número de elementos que se representan con un mismo símbolo pueden ser:a) Esquemas unifilares: cuando se representan con un mismo trazo varios conductores o elementos que se repiten.
Se utilizan para los circuitos de potencia de sistemas polifásicos en los que se dibuja una fase y se indica sobre el conductor a cuántas fases se extiende según sea bifásico, trifásico, etc.
b) Esquemas multifilares: cuando se representan todos los conductores y elementos cada uno con su símbolo.
Se utilizan en la representación de los circuitos de mando, donde cada elemento realiza funciones diferentes, y para representar circuitos de potencia de automatismos.

Por el lugar en que están situados los dispositivos de un mismo automatismo dentro del esquema existen los siguientes tipos de representación:
a) Representación conjunta: todos los símbolos de dispositivos de un mismo aparato están representados próximos entre sí y se aprecia la función de cada uno de ellos en su conjunto.
Esta representación está en desuso por la complejidad a que se llega en circuitos de grandes dimensiones.
b) Representación semidesarrollada: los símbolos de dispositivos de un mismo aparato están separados, aunque situados de manera que las uniones mecánicas se definen con claridad.
c) Representación desarrollada: los símbolos de dispositivos de un mismo aparato están separados y las uniones mecánicas entre ellos no se dibujan.
En este tipo de representación deben estar identificados todos los dispositivos y aparatos para que quede clara la actuación y la secuencia de cada uno de ellos.
Esta es la forma más utilizada por los técnicos.

Método de la Cuadrículas
Para la localización de elementos dentro del esquema el método más utilizado es el de cuadrícula, que consiste en numerar la parte superior de las hojas (eje horizontal) 1, 2, 3, etc., y en la parte izquierda (eje vertical) con letras A, B, C, etc., según sea necesario.El dibujo queda dividido en cuadrículas de manera que tendremos localizados los aparatos con las coordenadas que ocupan en el dibujo.
Las cuadrículas no tienen porque ser iguales, ajustándose a las necesidades del esquema.
Cuando la complejidad del esquema lo requiera se utilizarán anexos.

Referencias Cruzadas
En los circuitos de mando, lo más habitual es dibujar debajo de cada aparato sus contactos y un número que nos indica dónde están localizados en el esquema (referencias cruzadas).Otra manera de representar las referencias es en forma de tabla, indicando el tipo de contacto abierto o cerrado y un número debajo que nos indica dónde se encuentra en el esquema.
En el esquema de abajo, el KM1 tiene 1 contacto abierto (A) en la columna 1 del esquema y un contacto cerrado (C) en la columna 2.
El KM3 solo tiene uno cerrado en la columna 1 del esquema.
El KM2 solo tiene uno abierto en la columna 2.
El KA1 (contactor auxiliar 1) tiene uno abierto en la columna 3 y uno cerrado en la columna 1.

Identificación de los Conductores del Automatismo
Es recomendable identificar todos los conductores mediante marcas identificadoras, especialmente en los circuitos que por su complejidad se hace obligatoria para facilitar la comprensión y el mantenimiento.Aunque la identificación no es obligatoria, de hecho en casi ningún esquema lo verás, cuando pasemos del esquema al montaje del cuadro eléctrico, tener identificado los cables será de mucha utilidad para no equivocarnos.
Dichas marcas deberán identificar todos los conductores en el esquema con las mismas marcas que llevarán visibles físicamente los conductores en los montajes eléctricos.

Cada conductor o grupo de conductores conectados equipotencialmente deberá llevar un número único igual en todo su recorrido y distinto de otras conexiones equipotenciales.
Físicamente, dicha marca se pondrá en lugar visible fijada al conductor y cerca de todos y cada uno de los terminales o conexiones.
Las marcas inscritas en el esquema deben poderse leer en dos orientaciones separadas con un ángulo de 90º, desde los bordes inferior y derecho del documento.
Se deben situar orientadas en el mismo sentido que el trazo del conductor (para trazos verticales de conductor, las marcas se escribirán de abajo a arriba en el sentido del trazo para poder leer desde el borde derecho del documento).
Veamos un ejemplo de marcado de los conductores en un esquema de fuerza y en otro de mando:


Esquemas de Automatismos
Todos los circuitos relacionados con el entorno de los automatismos eléctricos se representan gráficamente en estado de reposo.El esquema de potencia se alimenta siempre con las 3 fases si es trifásico.
El esquema de mando solo con una fase y el neutro.
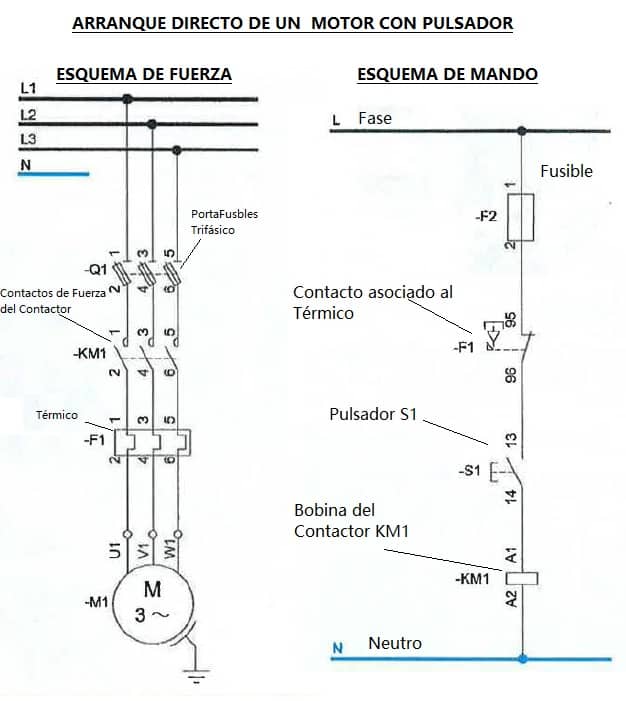
El primer esquema que veremos será el arranque directo de un motor pulsando un pulsador.
Una vez que soltamos el pulsador el motor se pararía, y deberíamos tener siempre el pulsador pulsado si queremos que el motor permanezca arrancado.
Fíjate cómo sacamos el circuito de mando desde el de fuerza, aunque realmente se representan por separado.
Arranque Motor Trifásico Con Pulsador
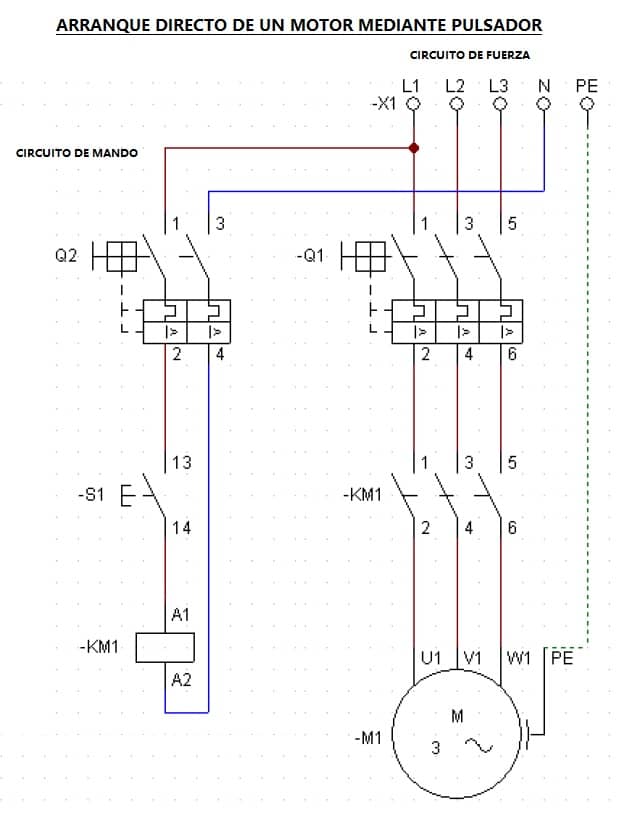
Podríamos encontrar el esquema con otro elemento de protección, por ejemplo en lugar de un magnetotérmico (Q2) con un fusible trifásico y un relé térmico.
Hoy en día se utilizan guardamotores (Q2) para la protección de los motores en los automatismos, son simplemente magnetotérmicos, incluso el símbolo es el mismo,pero diseñado especialmente en su funcionamiento para la protección de motores.
Para saber más visita: El Guardamotor
Se colocan al principio del esquema, y también se utiliza el relé térmico justo antes del motor.
Ahora vamos a ver varios esquemas solo demando, representando las salida con lámparas, ya que creo que es la mejor forma de explicar cómo funcionan.
Realmente el esquema más complicado siempre es el de mando, en definitiva el de fuerza es el arranque del motor o motores, aunque por supuesto veremos algunos esquemas más adelante, como estrella triángulo, inversión de giro, etc.
Control Manual mediante un Conmutador
El conmutador tiene 2 posiciones en las que puede quedar enclavado.La posición 1 (línea continua) corresponde a la posición de reposo o paro del contacto (NA).
En esta posición la bobina de mando de KM1 está desexcitada.
El contactor KM1 se activa poniendo S1 en posición de "marcha".

No es muy aconsejable la utilización de este control, a menos que sea sobre máquinas no peligrosas que puedan funcionar sin vigilancia.
Si se produjera un corte de corriente estando S1 en "marcha", al volver la alimentación la bobina de mando de KM1 quedaría excitada y la máquina o motor sobre el que actúa se pondría en marcha.
Arranque Directo Motor con Enclavamiento Eléctrico
Se trata de que el motor quede arrancado una vez que pulsemos el pulsador de arranque (S2) y al soltarlo sigua en funcionamiento.Para parar el motor se debe de pulsar el pulsador de paro (S1)
Disponemos ahora de 2 pulsadores: uno de paro (S1) y otro de marcha (S2), éste último en paralelo con un contacto auxiliar del contactor KM1 (contacto de enclavamiento o de autoalimentación)
Al estar en paralelo, una vez activada la bobina del KM1, este contacto abierto y en paralelo, ahora se cierra y es por donde seguirá alimentada la bobina KM1 aunque soltemos el pulsador S2.
El enclavamiento eléctrico no es más que una realimentación.
Aquí si que te representamos los 2 esquemas, debido a la importancia del circuito.

Un automatismo en el que se utiliza el contacto de enclavamiento para garantizar la alimentación de la bobina de mando cuando se libera el pulsador que excita dicha bobina, recibe el nombre de circuito con realimentación o con memoria.
Puedes ver también el contacto de realimentación o memoria que sale de la fase, realmente es lo mismo.

En este esquema hemos representado las referencias cruzadas, sería bueno que lo recordaras en el enlace: Automatismos
Aquí no las pondremos para dejar solo el esquema que es realmente lo que nos interesa aprender, pero eso no significa que no tengamos que ponerlas, sobre todo en esquemas muy grandes para no perderse.
Arranque Motor Desde Diferentes Posiciones
Si ahora quisiéramos tener el mismo esquema pero que pudiéramos arrancar el motor desde diferentes sitios (diferentes pulsadores).Deberíamos colocar pulsadores abiertos en paralelo al pulsador S2 (ahora será S3), pero OJO también en cada una de esas posiciones que arrancamos el motor, lógicamente deberíamos poder pararlo, por eso se colocan también la misma cantidad de pulsadores, pero cerrados y en serie, con el de paro (S1).
Veamos el esquema para el caso de 2 posiciones:

.
Arranque Motor con Marcha Preferente
Ahora veamos el esquema de arranque con memoria, pero dando prioridad a la conexión, es decir, si se dan las 2 condiciones Marcha-Paro a la vez, la opción predominante será la Marcha.Debido a esto es un montaje denominado Prioridad a la Conexión o de Marcha Preferente.
En caso de darse las condiciones de forma no coincidente, el funcionamiento será similar al descrito en el apartado anterior.

Fíjate que si pulsáramos los 2 pulsadores a la vez, S1 y S2, a la bobina solo le llegaría corriente por S1, ya que por S2 no le puede llegar corriente hasta que no esté activada la KM1.
Eso si, una vez el motor esté en marcha (bobina activada), ya podemos pulsar S1 parapararlo cuando queramos, por eso se llama de "Marcha Preferente", porque primero hay que arrancar el motor y luego pararlo.
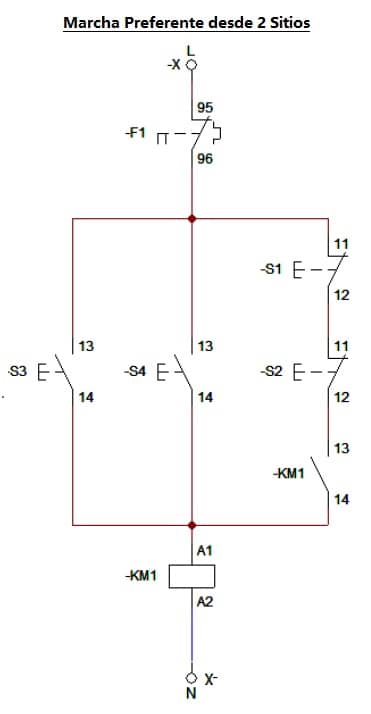
Marcha Preferente desde 2 Sitios Diferentes
Poco que comentar, mas en serie y en paralelo, como antes.Recordar que en este circuito hemos puesto el contacto F1 cerrado asociado al térmico, en caso de que el relé térmico salta /se desactive), este contacto se abre y deja sin alimentación a la bobina del contactor y por tanto se pararía el motor.
Señalización de Paro y Marcha del Motor
Para saber si un motor está parado o en marcha, normalmente se hace mediante una lámpara verde para señalizar la marcha y una roja para señalizar el paro.Estas lámparas se colocan de la siguiente forma en los esquemas:

La lámpara de marcha también podría ponerse en serie con un contacto abierto del contactor y en un línea del circuito diferente, en lugar de en paralelo con la bobina.
Control de Contactores Asociados
En muchos de los automatismos que controlan procesos es necesario controlar contactores que trabajan de forma asociada.Por tanto, es un requisito imprescindible que un contactor esté activado para que funcionen otros, o bien que esté desactivado para que puedan activarse otros.
Estas son las normas básicas de trabajo:
- Cuando queramos que un contactar (KM2) se active solamente si ya está activado otro (KM1), colocaremos contactos normalmente abiertos (NA) de KM1 en serie con la bobina de mando de KM2.
- Cuando queramos que un contactar (KM2) se active solamente si no está activado otro (KM1), colocaremos contactos normalmente cerrados (NC) de KM1 en serie con la bobina de mando de KM2.

Antes de seguir creo que es le momento de plantearte un ejercicio.
Queremos un automatismo que funcione con las siguientes condiciones:
- Cuando pulso el pulsador S1 el S2 se queda luciendo la lámpara de señalización H1.
- Si ahora pulso S3 ó S4 deja de lucir H1, pero si no luce H1, entonces debe lucir la lámpara de señalización H2.
- El esquema debe ser con Prioridad a la desconexión.
Intenta pensarlo y desarrollarlo en una hoja por ti mismo.
De todas formas aquí tienes la solución:

¿Y si la prioridad fuera a la conexión?
Ese te lo dejamos a ti solito.
Hagamos otro ejercicio:
Condiciones:
- Mediante el pulsador S1 se acciona (luce) la lámpara H1.
- Mediante el pulsador S2 se acciona (luce) la lámpara H2, pero ojo, solo si está activada H1.
- Un pulsador de paro S0 desconecta todo.

Ahora te planteamos el ejercicio al revés.
¿Qué hace el siguiente circuito?

Pues la solución es:
Es un secuencia de contactores de tal forma que:
Cuando pulsamos S1 luce H1 (K1) no lucen H2 y H3
Cuando pulsamos S2 luce H2 y se apaga H1 y H3 no luce
Cuando pulsamos S3 luce H3 y se apaga H1 y H2
Arranque de 3 Motores en Cascada

Inversión de Giro de un Motor
Para que un motor cambie de sentido de giro solo es necesario que cambiemos el orden de alguna de las fases al llegar al motor.En esquema siguiente cambiamos la L1 por la L2 (fíjate en el esquema de fuerza).
En este caso lo vamos hacer mediante pulsadores pasando por paro.

Inversión de Giro Mediante Finales de Carrera
Se trata de que los finales de carrera, cuando el motor llega al final del recorrido en una dirección, hagan el cambio de sentido del motor de forma automática.Tenemos en el esquema 2 finales de carrera S2 y S3 y cada uno de ellos con 2 contactos, uno abierto y otro cerrado.
F1 activa el motor y el motor estaría girando en un sentido y en otro constantemente y solo se pararía al pulsar S1

Nota: en lugar de finales de carrera podríamos utilizar detectores de proximidad inductivos.
Circuitos de Mando con Temporizadores
En muchísimos automatismos es necesario introducir retardos entre las diferentes maniobras que se pueden realizar.Vamos a ver algunos circuitos de control que utilizan temporizadores.
Temporizador a la Conexión
En el esquema siguiente puedes ver el esquema de un relé con un contacto de cierre inmediato (23-24) y otro temporizado a la conexión o excitación (17-18).Al accionar el pulsador de marcha S2 se excita la bobina del relé KT1 y se cierra su contacto de enclavamiento.
El cierre del contacto garantiza que, tras liberarse S2, KT1 continúe activado.
Una vez activado KT1, su contacto temporizado se activa (se cierra, puesto que es NA) pasado un tiempo de retardo t.
Tras este tiempo se ilumina la bombilla H1 ( o arranca un motor en el circuito de fuerza).
Ésta permanece así hasta que se desactiva KT1 mediante el pulsador de paro S1.

Temporizador a la Desconexión
Cuando se acciona el interruptor S1, la bobina del relé KT1 queda excitada y su contacto temporizado (17-18) se cierra inmediatamente.Tras ello, se ilumina de nuevo el señalizador H1.
Esta situación se prolonga hasta que desenclavamos S1, hecho que desexcita la bobina de KT1.
Pero su contacto no se abre entonces: al ser temporizado a la desconexión, el señalizador H1 permanece iluminado hasta que, pasado un tiempo t, se abre el contacto temporizado.

Hagamos un ejercicio de temporizadores.
Condiciones del automatismos:
- Un pulsador S1 pone en funcionamiento las lámparas H1 y H2.
- A los 5 sg se quedan conectados H1 y H3.
- H2 y H3 nunca pueden esta conectados a la vez.
- S0 desconecta todo.
- El temporizador es electrónico y una vez haya realizado su función de conectar H3 y desconectar H2 debe quedarse desconectado.
Solución:

Inversión de Giro con Pausa
Vamos a ver el esquema de la inversión de giro mediante finales de carrera, al igual que el que vimos antes, pero en esta ocasión vamos hacer que se haga una pausa antes de que el motor cambie de sentido de giro una vez que llega el final de carrera.El esquema de fuerza es idéntico al anterior, por eso solo representamos el esquema de mando.

Arranque Estrella Triángulo
Para saber todo sobre este tipo de arranque, muy importante en los automatismo visita la web especial que hemos realizado para este tipo de arranque: Estrella-Triángulo.Arranque Mediante Arrancador Progresivo
En algunas ocasiones en lugar de utilizar el arranque estrella-triángulo se utilizan los arrancadores progresivos.Los arrancadores progresivos o suaves, son dispositivos de electrónica de potencia que permiten arrancar los motores de inducción de forma progresiva y sin sacudidas, limitando así las puntas de corriente en el momento del arranque.
Los arrancadores disponen de un bloque de potencia o fuerza, a través del cual se alimenta el motor, y un bloque de mando, que permite gestionar el arranque de forma autónoma o por medio de un circuito externo.
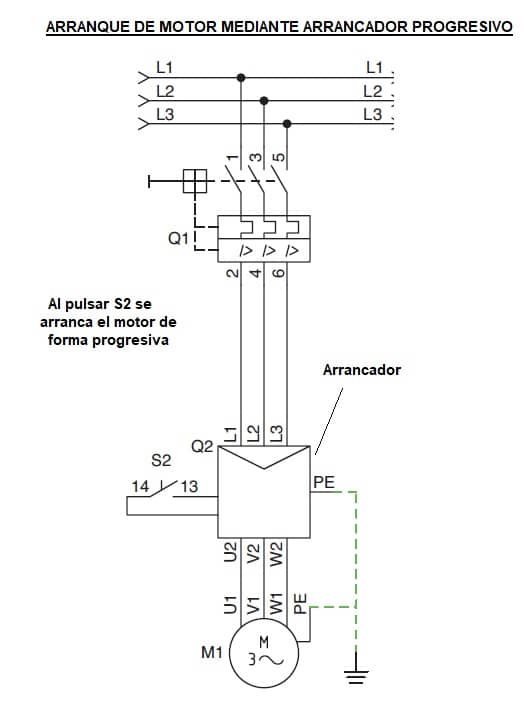
Otra posibilidad consiste en insertar un contactor (KM1) antes del arrancador progresivo, de forma que el corte y la activación del motor se pueda gestionar desde un circuito de mando externo.
Arrancador Mediante Variadores de Frecuencia
Como su nombre indica es un aparato electrónica que varía la frecuencia de la red durante el arranque, y como ya sabemos, si varío la frecuencia del motor, varía su velocidad.En el esquema siguiente hacemos e arranque mediante un interruptor de 3 posiciones, la I, la 0 y la II.

Escalera Automática
Veamos una escalera automática con célula fotoeléctrica


Motor Dahlander de 2 Velocidades
El motor de dos velocidades tiene las mismas características constructivas que el motor normal, su diferencia esta únicamente en el bobinado, pues mientras en el motor normal cada bobinado corresponde a una fase, en el motor Dahlander el bobinado de una fase está dividido en dos partes iguales con una toma intermedia.Según conectemos estas bobinas conseguiremos una velocidad más lenta o más rápida, pues en realidad lo que se consigue es variar el número de pares de polos del bobinado.
En el esquema siguiente se ha representado el circuito de fuerza de un motor trifásico de polos conmutables para dos velocidades en conexión Dahlander.
La velocidad inferior se obtiene cuando el contactor K1M esta únicamente accionado. La velocidad superior se consigue desconectando K1M y accionando en conjunto los contactores K2M y K3M.

Ejemplos de Automatismo
Puerta Automática de Garaje
Condiciones:1 - Al ponerla en marcha la puerta sube hacia arriba
2 - Al llegar la puerta hasta arriba ésta se detiene durante 17 segundos
3 - Pasados los 17 segundos la puerta empieza a cerrarse hacia abajo
4 - Cuando la puerta llegue hasta abajo ésta se detendrá por completo
5 - La puerta podrá ser detenida manualmente mediante un botón de paro
Hacemos inventario y llegamos a la conclusión de que necesitaremos los siguientes materiales:
1 - Un motor
2 - Un relé F2
3 - Una botonera con dos botones S1, S2
4 - Un contactor principal KM1
5 - Un contactor secundario para la inversión de giro KM2
6 - Un contactor auxiliar para el temporizador KA1
7 - Un temporizador neumático al trabajo KA1t
8 - Dos finales de carrera FC1, FC2
9 - Luces de señalización HR, HV, HN y HA
Hemos utilizado el contactor KM1 para que la puerta suba hacia arriba y gracias a la inversión de giro realizada en el motor colocamos KM2 para que la puerta se deslice hacia abajo.
Al pulsar el botón de marcha S2, le llega un pulso directo de tensión a la bobina de KM1, esto hace que su contacto 13-14 se cierre y el motor comience a girar subiendo la puerta.
Cuando la puerta llega hasta tope, pisa con ello el final de carrera FC1 lo que hará que su contacto cerrado se abra dejando fuera de servicio el motor y al mismo tiempo el contacto abierto de FC1 se cierre enviando un pulso de tensión a la bobina del contactor auxiliar KA1.
Esto pone en marcha el temporizador y una vez expirados los 17 segundos, el contacto abierto de KA1 se cierra enviando un pulso de tensión a KM2 y cerrando el contacto abierto 13-14 de dicho contactor.
En ese momento la puerta comienza a bajar.
Una vez que la puerta se cierra por completo, ésta pisa el final de carrera dos FC2, lo que hará que su contacto cerrado se abra y con ello desconecte el motor.

Automatismo Para Control de un Semáforo
Este circuito es el necesario para poner en funcionamiento un semáforo.El tiempo de encendido de los discos se regulará mediante los temporizadores.
El funcionamiento será de manera indefinida (ciclo continuo).
Se enciende con un pulsador (S1) y se detiene con un pulsador (S2).
La secuencia es la siguiente:
Verde 20 segundos.
Amarillo 5 segundos.
Rojo 10 segundos.

Para acabar, déjame recomendarte el mejor libro para aprender los automatismos: Libro Automatismos Eléctricos
¿Te ha gustado la web Esquemas Automatismos? Pulsa en Compartir. Gracias
© Se permite la total o parcial reproducción del contenido, siempre y cuando se reconozca y se enlace a este artículo como la fuente de información utilizada.
TAMBIEN TE PUEDE INTERESAR
Planos de Electricidad
Documentos en un Proyecto Electrico
Autómata Programable
Lenguaje de Contactos
Automatización
Cuadros Eléctricos
Automata PLC LOGO de Siemens
Automata PLC Zelio Schneider
Maquinas Electricas
Simbologia KNX
Motor Trifasico
Bomba de Calor
Sensores Eléctricos
Formatos del Papel
Plegado de Planos
Circuitos Electricos