
DIAGRAMA O LENGUAJE DE CONTACTOS
El lenguaje ladder, Lenguaje KOP, diagrama ladder, diagrama de contactos, diagrama de relés, o diagrama de escalera, es una forma de representación gráfica de circuitos eléctricos que se asemeja mucho al esquema eléctrico de la lógica cableada (el de siempre).
Nosotros le llamaremos lenguaje de contactos o Ladder en esta página, aunque ya ves que tiene muchos nombres diferentes, pero todos son lo mismo.
Nota: la abreviatura que se utiliza para este tipo de lenguaje ladder es LD o KOP.
Es un lenguaje de programación gráfico y muy popular dentro de los autómatas programables debido a que está basado en los esquemas eléctricos de control clásicos, también llamados de lógica cableada.
De este modo, con los conocimientos que todo técnico o ingeniero eléctrico posee, es muy fácil adaptarse a la programación de los autómatas mediante este tipo de lenguaje.
Antes de empezar, déjame recomendarte el mejor libro para aprender los automatismos eléctricos: Libro Automatismos Eléctricos
Indice de Contenidos:
- Del Esquema Eléctrico al Lenguaje de Contactos
- Símbolos en Lenguaje de Contactos
- Contacto NOT
- Enclavamiento o Realimentación
- Las Marcas Internas
- Trabajo por Flancos
- El Temporizador
- Los Contadores
- Lenguaje de Contactos y PLC
- Ejemplos de Automatismos en Lenguaje de Contactos
Del Esquema Eléctrico al Lenguaje Ladder
De forma general, podemos decir que este tipo representación gráfica de circuitos está compuesta por contactos que actúan sobre una o varias salidas llamadas bobinas.Los esquemas eléctricos de lógica cableada, es decir los clásicos de toda la vida, se leen de arriba a abajo, pero el diagrama ladder o de contactos se lee de izquierda a derecha y de arriba hacia abajo.
Se llama ladder o escalera porque los dispositivos se conectan en diferentes ramas en paralelo, y todo el conjunto se asemeja a una escalera, en donde cada conexión en paralelo sería un escalón de la escalera.
Para la representación de un circuito de control mediante un diagrama de escalera, es indispensable comprender que cada rama del diagrama (escalón de la escalera) está compuesta de un número de condiciones de entrada y un solo elemento de salida.
Las condiciones de entrada determinan si la salida debe ser energizada o no (activada o sin activar).
Todas las condiciones de entrada son representadas en la parte izquierda de la rama, y la condición de salida se representa en la parte derecha.
Los pulsadores se representan como contactos.
Las bobinas de los relés o contactores se representan como las salidas.
Fíjate en la siguiente imagen:
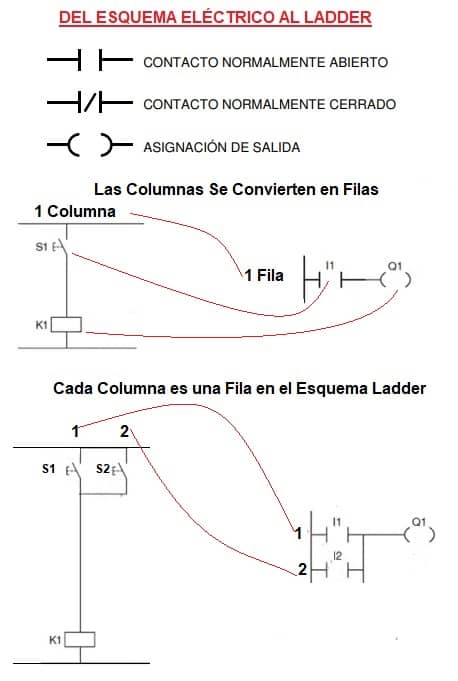
Podemos representar el pulsador S1 mediante una entrada que llamaremos I1.
La bobina del contactor K1, la llamaremos salida y se representará mediante el símbolo de la bobina Q1.
En el primer esquema al activar el contacto I1 (del PLC) se activa la bobina Q1 (la del contactor).
Es equivalente a que al pulsar S1 se activa K1 en el esquema de lógica cableada o convencional.
Cada columna del esquema eléctrico convencional, a la hora de pasarla a el esquema en ladder (LD), se hace mediante una fila.
Las filas se llaman Líneas de Instrucciones.
El esquema LD se lee de izquierda a derecha, por ejemplo como ya vimos, en el primer esquema leeremos que al activarse el contacto I1, se activa la salida o bobina Q1.
El segundo esquema se leería la primera fila, es decir, al activarse I1 se activa Q1, pero además al activarse I2 también se activa Q1.
Siempre que esté cualquiera de los dos contactos activados, la salida Q1 estará activada.
Esto representaría la función OR o el circuito de 2 pulsadores en paralelo.
OJO hablamos siempre de pulsadores, no de interruptores.
Este tipo de diagrama se utiliza para los autómatas programables y PLCs, por eso las entradas se nombran como I1, I2.... ya que es así como se llaman las entradas en los autómatas.
Lo mismo sucede con las salidas, las salidas en los PLC se llaman Q1, Q2, Q3....
Un contacto abierto I1 quiere decir que está asociado a la entrada I1 del autómata.
Para una representación adecuada que nos permita la interpretación exacta de un diagrama de escalera, además de lo dicho anteriormente, es importante asignar letras y números a los elementos de entrada, de control y de salida involucrados en el circuito, tal como se hace en los esquemas elétricos convencionales.
También, cada una de las ramas es numerada en forma ascendente, colocando dicho número en la extrema izquierda de cada rama del diagrama de escalera.
Veamos un ejemplo de esto:

En el diagrama se observa, que la condición para que la lámpara L1 sea energizada (luzca), es que el pulsador I1 sea presionado.
Cuando I1 es presionado el rele Rl es energizado (rama 1), por lo que el contacto N.A. llamado R1 controlado por él (rama 2) se cierra, permitiendo que la lámpara L1 se energice.
Fíjate que al lado del símbolo del relé R1 tenemos puesto los contactos que tendremos en el total del esquema de este relé concretamente, tanto abiertos (letra a) cómo cerrados (letra b)
En este caso habría 2 contactos abiertos de R1 en el total del esquema, aunque en esta parte del esquema no veamos el segundo contacto, y no tendremos contactos cerrados (b).
Nota: esto último no lo verás en muchos de los esquemas que representaremos y que verás en libros, el motívo es que si el esquema es pequeño no es necesario.
Símbolos en Lenguaje Ladder
Pero ahora veamos todos los símbolos que utilizaremos para generar nuestros esquemas en lenguaje de contactos: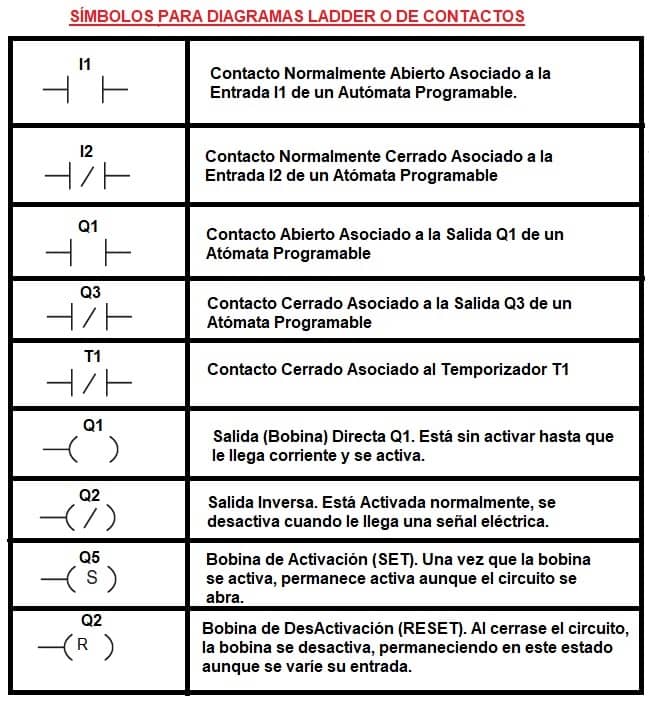
Los contactos normalmente abiertos y cerrados se representan igual para representar pulsadores o simples contactos que para representar un contacto de un temporizador, relé o cualquier otro sensor, la única diferencia es la letra que va escrita por encima del símbolo.
Si es un Q1 el contacto lo abre o lo cierra la activación de la bobina o salida Q1
Si es un T1 el contacto lo abre o lo cierra la activación de la bobina o salida T1
Hay 2 bobinas o salidas especiales muy usadas en los automatismos, son la SET y la RESET.
La bobina SET es una bobina que de enclavamiento, es decir, cuando le llega corriente eléctrica se queda activada, pero al soltar el pulsador o abrirse el contacto que la activa, en lugar de desactivarse permanece activa (enclavada).
Podríamos decir que es una bobina con memoria.
La bobina RESET lo que hace es que al llegarle corriente en lugar de activarse se desactiva.
Se utiliza para resetear los circuitos o parte de ellos, es decir para apagar y dejar los circuitos como estaban al principio, en estado de reposo.
Contacto NOT
Hay un tipo de contacto, más bien de operador lógico, que se llama NOT.Lo que hace este "contacto" es invertir todo lo que le llega antes de el en el circuito.
NO es muy utilizado pero aquí tienes un par de ejemplos:
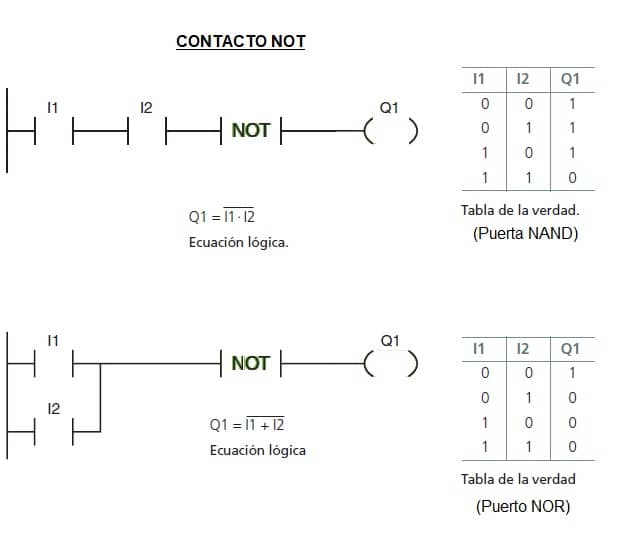
En el primer caso, para que la Q1 esté activada tendrían que estar activados I1 e I2, pero como hay una Not detrás de ellos, cuando no están activados es cuando se activa Q1.
Es equivalente en electrónica digital a la puerto lógica NAND.
Enclavamiento o Realimentación
Mediante estas bobinas SET y RESET podríamos hacer el esquema de enclavamiento o realimentación que te recordamos en la siguiente imagen:
Necesitamos un propio contacto abierto del contactor Km, en paralelo con "Sm", para que el motor siga funcionando cuando pulsamos Sm (pulsador de marcha).
OJO muchas veces, sobre todo con el LOGO pueden darse errores al poner pulsadores cerrados.
Normalmente los autómatas programables tienen siempre pulsadores abiertos para controlar las entradas.
Si queremos hacer un paro marcha controlado con 2 pulsadores abiertos, necesitamos una bobina SET y un contacto abierto (el pulsado) para tener nuestro circuito, como puedes ver en el esquema de arriba.
Al cerrar el contacto abierto la bobina se activa, pero al cerrarlo la bobina sigue activada.
En el esquema de lógica cableada cuando pulsamos Sp (pulsador de paro) se desactiva la bobina y el motor se para.
En Ladder para hacer el paro necesitamos una bobina RESET que desactive la salida.
Recuerda que la bobina RESET lo que hace es que al llegarle corriente en lugar de activarse se desactiva.
Las Marcas Internas
Las marcas se utilizan mucho en los autómatas programables para utilizar salidas (bobinas) que realmente solo son necesarias para el funcionamiento integra del circuito, pero en esa salida no habría nada físico o real conectado.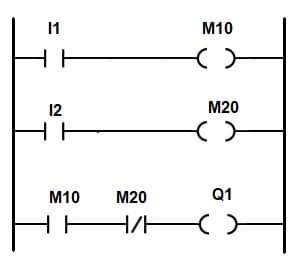
En el esquema anterior se supone que en la salida Q1 hay un relé, autómata, lámpara o cuaquier receptor conectado, pero en M10 y M20 no hay nada conectado porque son salidas ficticias, solo para que el esquema funcione como queremos.
Cuando la marca M10 está desactivada y la marca M2 activa mediante el contacto I2, entonces solo en ese caso la salida Q1 estará activada y lo que está conectado a ella se energizará.
Si fuera un autómata no vamos a utilizar una salida para M10 o M20 del propio autómata porque no queremos conectar nada en esas salidas.
Trabajo por Flancos
En ocasiones la forma de trabajar, es decir activar o desactivar las entradas es por flancos.Los flancos son simplemente señales digitales, un 0 o un 1.
Flanco positivo significa que la señal pasa de 0 a 1.
Flanco negativo significa que la señal pasa de estado 1 a 0.
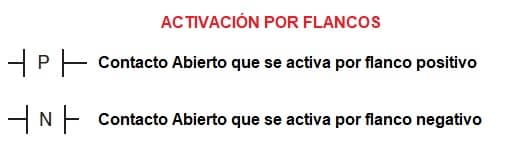
Podrían ser contactos normalmente cerrados.
Fíjate los siguientes circuitos y su diagrama de estado:

El Temporizador
Los temporizadores y los contadores que luego veremos, son las llamadas funciones especiales.Estas funciones o bloques de funciones especiales se representan con un rectángulo en cuyo interior se representan las diferentes funciones que pueden realizar.
El temporizador es un bloque que realiza una función al cabo de un tiempo determinado.
Por ejemplo, cuando pasen 15 segundos que se cierre un contacto abierto.
Los temporizadores tienen contactos abiertos y cerrados asociados a el, cuando se activa el temporizador y pasa el tiempo establecido, los contactos cerrados asociados a el se abren y los abiertos se cierran.
El símbolo en teoría usado es el siguiente:

- TON a la conexión
- TOF a la desconexión
Decimos en teoría porque casi nunca se utilizan esos símbolos, para los temporizadores en la mayoría de los esquemas se dibujan de la siguiente forma:

En este caso mediante I1 se activa el temporizador T1, y al cabo del tiempo establecido en el temporizador T1 se cierra su contacto T1 y se activa la bobina Q1.
El problema aquí es que en el esquema no especificamos el tiempo de activación o el tipo de temporizador.
Lo mas correcto sería como vemos a continuación:
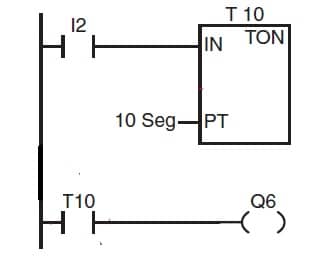
I2 activa el temporizador a la desconexión T10, como es del tipo TON, al cabo de 10 segundos se cierra el contacto T10 asociado al temporizador y se activa la bobina Q6.
Existen temporizadores a la conexión, a la desconexión etc, igual que en los otros tipos de esquema.
Si quieres saber mucho más sobre los temporizadores visita: Relé Temporizador
Los Contadores
Son bloques que realizan una función, por ejemplo abrir o cerrar un contacto del propio contador, cuando transcurre un número de sucesos.Suceso puede ser cuando le llegue corriente 3 veces a la entrada.
El contador cada vez que le llega corriente a la entrada cuenta 1 vez más, y al llegar a 3 el contacto asignado al contador, si es cerrado se abre y si es abierto se cierra.
Los contadores pueden contar al revés, es decir, ir descontando.
El contador es muy útil donde se deba memorizar sucesos que no tengan que ver con el tiempo pero que se necesiten realizar un determinado número de veces.
El símbolo es el siguiente:

Veamos un ejemplo:
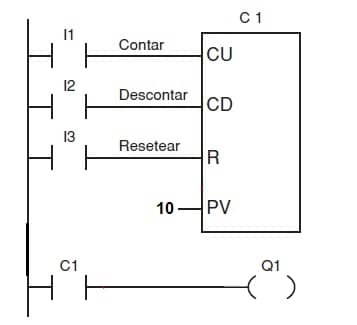
Al activar I1 el contador cuenta 1 mas del número que tenía y se guarda en la memoria.
Si nunca se había activado, entonces se pone a 1 la primera vez que le llega señal.
Al activar I2 el contador resta 1 al número que tenga guardado en la memoria.
Al activar I3 se pone a 0
El número que tiene que alcanzar en total es 15.
Cuando alcanza 15 los contactos cerrados de C1 se abren y los abiertos se cierran.
En este caso se cierra C1 y se activa la bobina Q1.
Lenguaje de Contactos y PLC
Las entradas del autómata o PLC I1. I2. I3.... se activan mediante la llegada de corriente de los pulsadores o sensores externos conectados a ellas.Cuando decimos que I1 se activa, estamos diciendo "cuando le llega alimentación (corriente) a esa entrada".
Cuando a I1 le llega corriente se considera estado 1 o activada, por lo que pasará de un contacto abierto a cerrado.
Pero la llegada (o no) de corriente a I1 y a todas las entradas depende del exterior, es decir de algún pulsador o sensor.
En el primer esquema de la siguiente imagen, esquema de marcha-paro de un motor, la I1 se activara, es decir se cerrará cuando el pulsador P1 se pulse (cierre) y el motor (Q1) arranca (marcha).
Al pulsar P2 se abre I2 y se para el motor.
El esquema segundo hace lo mismo, la diferencia es que el sensor externo, en este caso el pulsador, es normalmente cerrado (NC), por lo que I2 estará siempre activado (cerrado) hasta que pulsemos P2.
Los 2 esquemas hacen lo mismo pero con diferentes elementos externos.

Algunas veces en los esquemas, en lugar de representar la entrada I1 se pone el símbolo del pulsador S1.
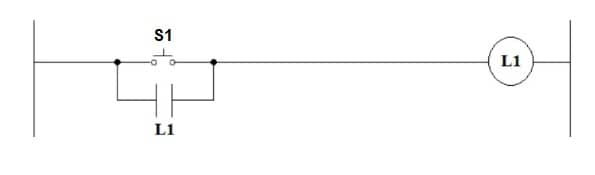
En el esquema de arriba S1 es un pulsador externo.
Nota: este símbolo del pulsador está desactualizado pero hemos querido ponerlo porque lo encontrarás en muchos esquemas.
Si este esquema lo queremos llevar a la práctica en un autómata o PLC deberemos conectar el pulsador externo a una entrada igual que el estado del pulsador (abierto), por ejemplo a la I1 del PLC.
La entrada I1 hará lo mismo que el pulsador, al cerrar el pulsador le llegará corriente a la I1 y se activará.
Cuando vayamos a realizar nuestro programa tendremos que pensar ¿qué ocurre al pulsar S1?.
En este caso queremos que el contacto abierto al que va conectado (I1) se cierre y que le llegue corriente a la bobina L1.
Normalmente todas las entradas de los PLC se activan mediante un pulsador o cualquier otro sensor externo.
Veamos un ejemplo para el arranque y paro de un motor eléctrico:
OJO en este PLC las entradas se llaman X1, X2... y las salidas Y1, Y2, Y3...

De hecho una de las primeras tareas que debemos hacer a la hora de realizar un automatismo de lógica programada es la asignación de las entradas y salidas del autómata o PLC a las entradas exteriores.
Una vez asignadas las entradas y salidas se conectan los sensores a ellas y después se introduce en el interior del PLC o autómata el programa que debe realizar, que puede ser en forma de lenguaje de contactos o ladder.

Ejemplos de Automatismos en Lenguaje de Contactos
Primero te dejamos una lista de videos donde aprenderás a crear varios programas en forma de prácticas con lenguaje Ladder o de Escalera. Empieza desde cero.El Limpiaparabrisas
Al desactivar el limpiaparabrisas de un automóvil en un día lluvioso, éste no se puede detener de inmediato en medio del cristal estorbando la visión, hay que esperar a que acabe su recorrido y se sitúe en la posición horizontal de reposo.
El montaje consta de los siguientes elementos:
Un interruptor NA conectado a la entrada I1 activará el limpiaparabrisas.
Un motor que hace girar la escobilla conectado a la salida Q1 (para simplificar se supondrá que el motor gira en un solo sentido)
Y un final de carrera que detecta la llegada a la posición horizontal conectado a la entrada I2.
Se desea que el funcionamiento sea tal que al desactivar el interruptor no detenga el limpiaparabrisas hasta que llegue a la posición horizontal.

Al activarse I1 se activa la bobina B1
La realimentación de B1 se hace mediante el contacto B1 de la primera línea en paralelo con I1.
El contacto B1 de la segunda línea se cierra y se activa Q1, es decir arranca el motor del parabrisas.
Si ahora desactivamos I1, no se para el limpiaparabrisas porque necesita 2 condiciones para pararse:
- Que se I1 esté desactivado (I1=0)
- Que la I2 esté activado (I2=1), o lo que es lo mismo que el final de carrera este activado porque la escobilla está en posición horizontal.
Estas condiciones son las de la tercera línea.
Encendido de bombillas
Se dispone de 3 pulsadores conectados a las entradas I1, I2 e I3 de un autómata y 3 bombillas conectadas a las salidas Q1, Q2 y Q3.
Se desea que al activar el pulsador 1 se encienda la bombilla 1 y se apague la 3, al pulsar el 2 se encienda la 2 y se apague la 1 y así sucesivamente.
Se supone que los pulsadores se activarán en orden (1,2,3,1…).
Tenemos 2 posibles soluciones (probablemente se pueda incluso hacer de más formas diferentes)
Soluciones:

¿Cómo sería el esquema si se desea encender las bombillas en cualquier orden y que no haya dos encendidas simultáneamente?
Solución:
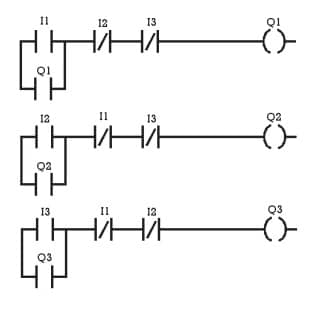
En este caso no se puede utilizar el contacto de salida pues una vez encendida una bombilla impediría que se pudiese encender cualquiera de las otras dos.
¿Qué se debería hacer para apagar las tres bombillas?
Presionando los tres pulsadores simultáneamente se apagarían las tres bombillas.
El Semáforo
En la lista de videos de antes tienes la explicación del semáforo.
Control de Llenado de un Depósito de Agua
Se desea controlar automáticamente el vaciado de un depósito en función del estado de un conjunto de detectores de nivel.
El sistema consta de una bomba que extraerá el agua del depósito activada por la salida Q1 y de tres detectores de nivel conectados a las entradas I1, I2 e I3.
El primer detector I1 corresponde al nivel superior e indica que el depósito está casi lleno, el segundo I2 indica un nivel de agua intermedio y el tercero I3 indica que el depósito está casi vacío.
Los tres sensores actúan del mismo modo, son normalmente abiertos, es decir se activan si el agua llega a su altura y se ponen a cero si el agua está por debajo.
Por último se dispone de un interruptor conectado a la entrada I10 para indicar al sistema si se desea vaciar el depósito del todo (I10=1) o solo hasta la mitad (I10=0).
La bomba se debe poner en marcha cuando el agua llegue al primer detector y seguir en funcionamiento hasta que el nivel se encuentre por debajo del segundo o del tercer detector en función de la posición del interruptor.
El cuadro resumen de las entradas y salidas a utilizar y de los dispositivos conectados a ellas es el siguiente:
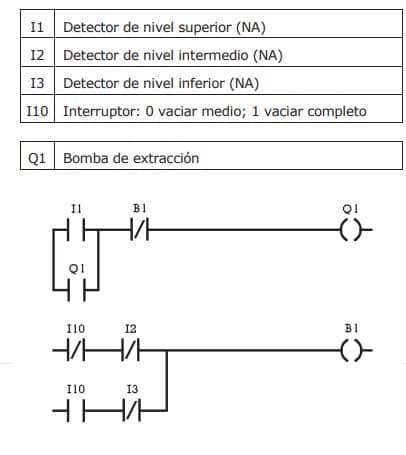
Es simplemente un circuito marcha-paro activado por el detector que indica que el depósito está lleno
Eso sí, existen dos situaciones distintas en las que se debe detener la bomba.
Por este motivo se ponen ambas condiciones en paralelo ya que cualquiera de ellas puede parar la bomba.
En el momento en que se verifique una de las dos circunstancias se activará B1 que a su vez desactivará la salida Q1.
Arranque de un Motor Directo con Encendido Temporizado
Aquí puedes ver los esquemas de Fuerza y de mando en lógica cableada y después el equivalente en lenguaje de contactos.

Portón de Garaje
Queremos controlar el portón de acceso a un garaje que se cierra automáticamente al apretar un pulsador conectado a la entrada I1 de un autómata.
El sistema cuenta con un detector magnético de proximidad conectado a la entrada I2, que se activa cuando la puerta está totalmente cerrada.
El motor eléctrico que mueve el portón está conectado a la salida Q1.
Se desea que al apretar el pulsador se inicie el abatimiento del portón hasta detectar que se encuentra totalmente cerrado, pero que en caso de que este proceso no se complete en 6 segundos se detenga de inmediato el motor, pues esta circunstancia indicará que algún obstáculo ha impedido un cierre correcto.
Solución:
Estamos ante un típico problema de marcha-paro solo que en este caso habrá que forzar el paro del motor si transcurren más de 6 segundos desde el comienzo de la maniobra.
Al iniciar el cierre habrá que disparar también un temporizador para generar ese intervalo de seguridad.
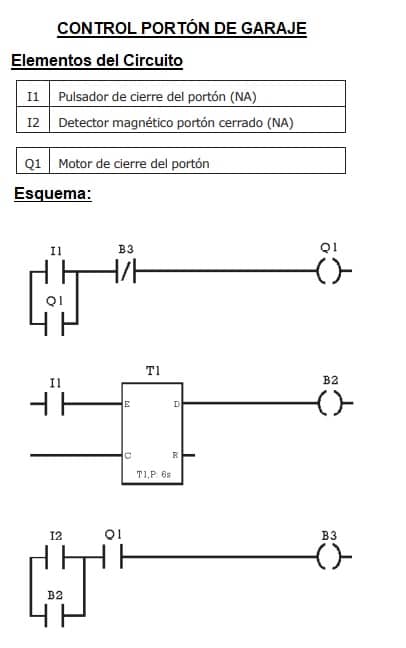
El motor se detendrá tanto si se activa I2 que indica que el portón ya se ha cerrado como si se activa B2 que indica que han transcurrido más de 6 segundos desde que se inició la maniobra.
En cualquier caso B2 se activará al cabo de los 6 segundos aunque el motor se haya detenido previamente por la acción de I2, pero eso no supone ningún problema pues simplemente confirma la orden de paro.
En la última línea se ha introducido Q1 para que B3 no quede permanentemente activado lo cual impediría reiniciar el proceso.
Al redactar así el programa, una vez retirado el obstáculo que haya impedido el cierre, se puede volver a pulsar I1 para completar la maniobra.
Nota:
En muchas ocasiones es necesario detener por seguridad un sistema si transcurrido cierto tiempo no se ha obtenido un resultado determinado ya que esto indica que algo no funciona correctamente.
Podría ser un motor que no alcanza unas determinadas revoluciones porque algo lo frena y corre el peligro de quemarse, una bomba que no consigue hacer circular el fluido porque la toma se encuentra obstruida o una caldera que no alcanza una temperatura determinada porque tiene una fuga.
En todos estos casos podemos utilizar como base el esquema anterior del portón.
Puerta Automática
Cuando una persona se acerca a la puerta, ésta debe abrirse automáticamente.
La puerta debe permanecer abierta hasta que no haya nadie en su camino.
Cuando no hay nadie en el camino de la puerta, esta debe de cerrarse automáticamente después de un breve periodo de tiempo (10 segundos).
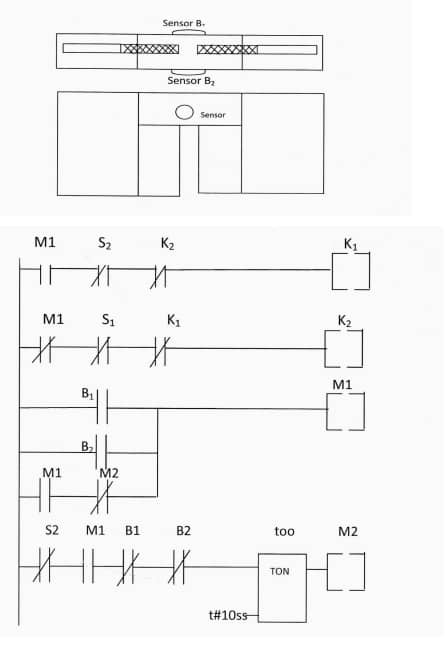
¿Qué Hace el Diagrama?
Pues eso, explica que hace cuando pulsamos el botón STAR
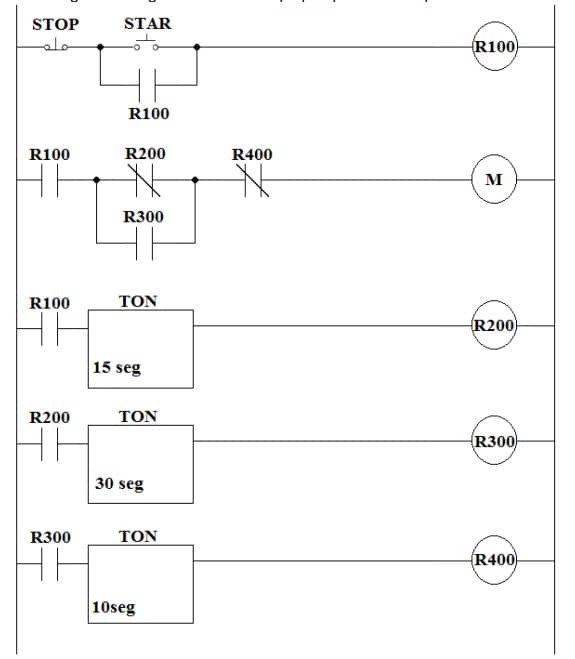
Solución:
Al presionar STAR se activa R100 y sus contactos, inmediatamente M se activa, simultáneamente se activa el bloque de temporización TON de 15 segundos (línea 3).
Transcurridos los 15 segundos se activa R200 y sus contactos desactivando M, inmediatamente se activa el temporizador TON de 30 segundos.
Transcurridos los 30 segundo se activa R300 y sus contactos, lo que activa nuevamente a M, al mismo tiempo se activa el temporizador de 10 segundos.
Transcurridos estos 10 segundos se activa R400 y sus contactos, desactivando M.
Al presionar STOP se desactiva R100, si se presiona STOP mientras este activo M este se desactiva inmediatamente.
Encendido y Apagado de Lámpara
Escribe el esquema para hacer que una lámpara “LAMP” se encienda al presionar un pulsador “INICIO”, la lámpara debe encenderse durante 10 segundos.
Luego debe permanecer apagada durante 10 segundos más y luego quedarse encendida hasta que se presione un pulsador “PARE” que la apagará transcurrido un tiempo de retardo de 10 segundos.
Dibuja también el diagrama de tiempos.

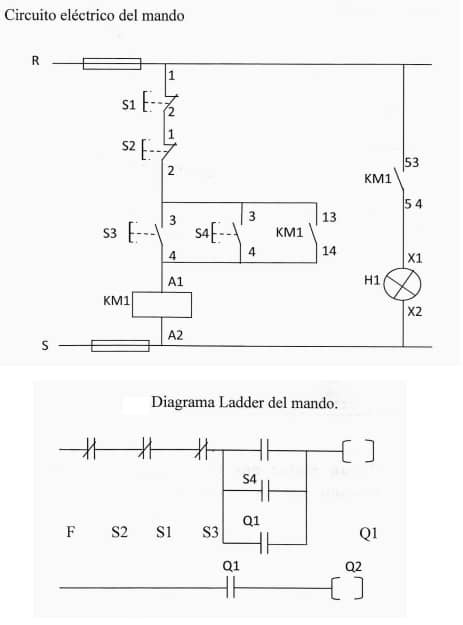
De Lógica Cableada a Lenguaje de Contacto
Convertir el siguiente circuito eléctrico con el esquema eléctrico en lógica cableada a un esquema en diagrama ladder o de contactos.
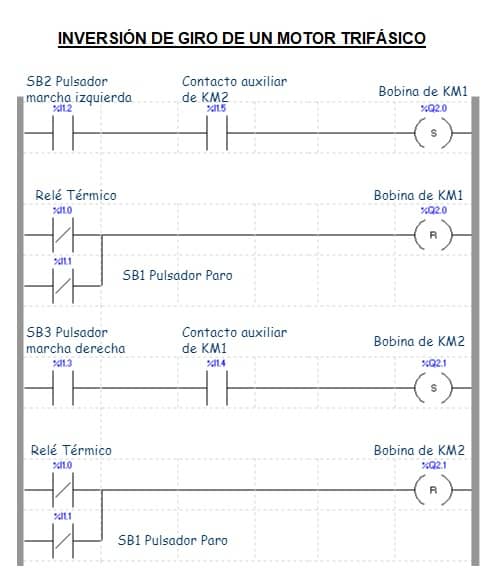
Inversión de Giro Motor Trifásico
Para acabar, déjame recomendarte el mejor libro para aprender los automatismos:
¿Te ha gustado la web Lenguaje de Contactos? Pulsa en Compartir. Gracias
© Se permite la total o parcial reproducción del contenido, siempre y cuando se reconozca y se enlace a este artículo como la fuente de información utilizada.
TAMBIEN TE PUEDE INTERESAR
Automatismos
Esquemas de Automatismos
Autómata Programable
Automatización
Automata PLC LOGO de Siemens
Automata PLC Zelio Schneider
Cuadros Eléctricos para Automatismos
Motor Trifasico
Motores Monofasicos
Arranque Estrella Triangulo
Conexión Bornes Motores de Corriente Alterna
Contactor
Relé Térmico
Circuitos Conmutados
Motor Electrico
Diferencial de Luz
Maquinas Electricas
Factor de Potencia
Tipos de Motores Electricos
Sensores Eléctricos